
10月10日,Apollo GO以北京亦庄和海淀为中心,开放了两处测试区域和试乘活动。根据官方规定,Apollo无人车的路线和总行程都遵循严格的限制:乘客只能在几个固定“车站”上下车,行车路线也已预先规划好。这让Apollo更像是一辆在几个站点间来回接驳的“摆渡车”,而非随停随走的“出租车”。
Apollo无人车车型均为林肯MKZ。这款冷门车型,可是无人驾驶测试界名副其实的宠儿。林肯MKZ有硬件优势,其线控油门,线控转向,线控制动都可以被电脑所控制。其次,无人驾驶AI想要控制车辆,必须通过接口连接车上的通讯协议,在向自动驾驶公司提供相关接口的车企中,林肯是为数不多的玩家之一。因此,将林肯改装为无人驾驶车是更便捷和经济实惠的选择。除了Apollo,英伟达,Pony AI 等有先进无人驾驶技术的公司,也都选择该款车型作为测试车辆。
Apollo无人车时速被严格全程限制在59km/h以内。比周围汽车的速度慢了许多,Apollo GO AI 这种级别的自动驾驶技术可以轻松胜任,但北京从来不缺交通复杂的路段,在车辆混乱的将台路,路线繁杂的西直门桥,Apollo GO AI 自动驾驶是否能自如前行,还得打个问号。
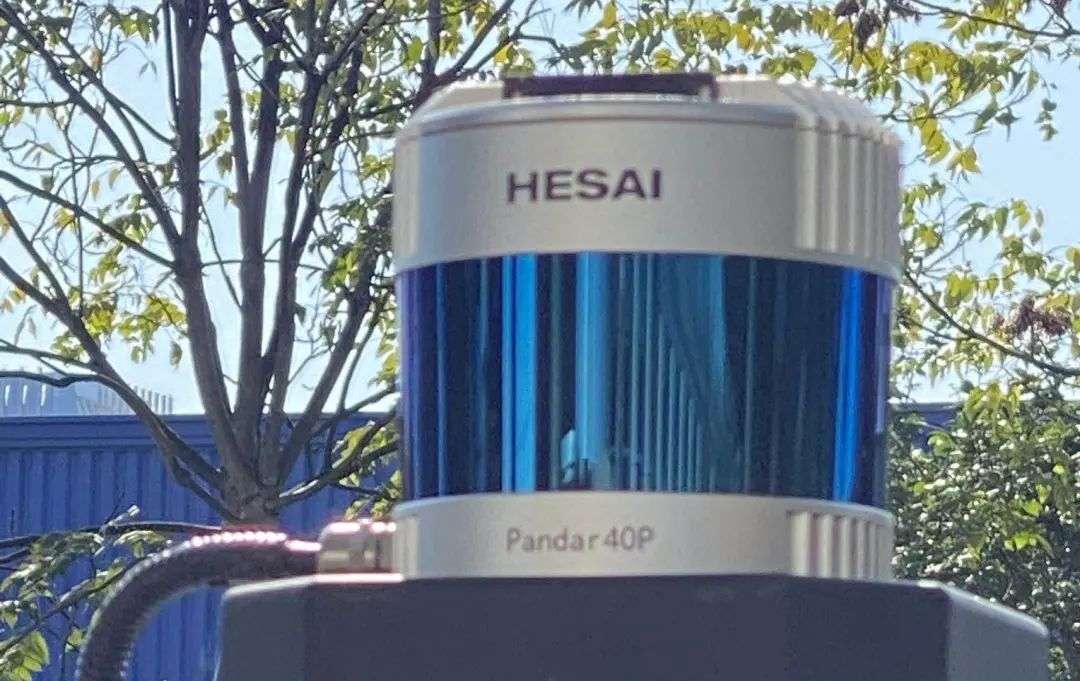
据百度宣称,Apollo目前已实现L4级别的自动驾驶。百度地图自带的数据加上车顶上方的六枚摄像头,可以识别出不同的车道线。至于周围环境的感知,则由车顶上方的激光雷达和车身上的毫米波雷达负责。这枚巨大的激光雷达由禾赛提供,型号为Pandar40P,官网信息显示,该型号产品最远探测距离为200米,拥有40度的视角范围以及抗干扰能力。
乘车过程中,一众传感器捕捉到的路况会在后排的平板电脑上实时显示。即使激光雷达已经架得很高,但是Apollo依旧不能避免视线受阻情况的出现——这是个非常现实的问题,会直接带来安全隐患。在测试中,车辆由于传感器被前面的大货车阻挡,而没能及时在红绿灯前停车,最后不得不在大货车停车时紧急刹车。
由于AI缺乏“驾驶经验”,有时转向或者规避行人时十分生硬,而且不同于人类驾驶员,AI在遇到突然出现的自行车和行人时会强行转弯躲避或者骤然刹车,虽然这让行人的安全得到了保证,但乘客却很容易因此感到颠簸,甚至会感到了轻微的晕车。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢