

✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
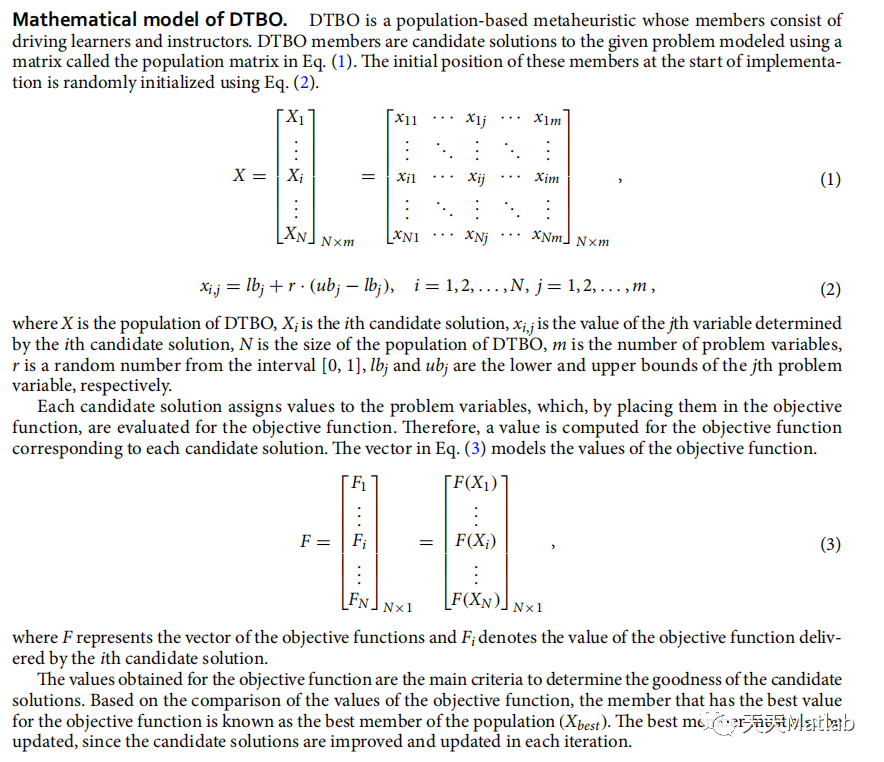
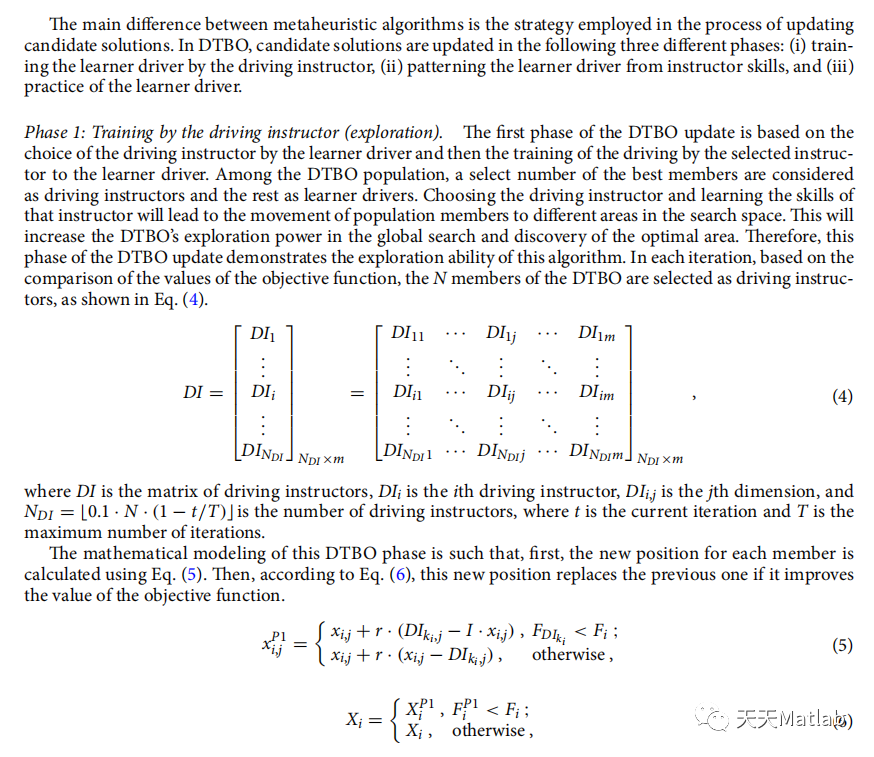
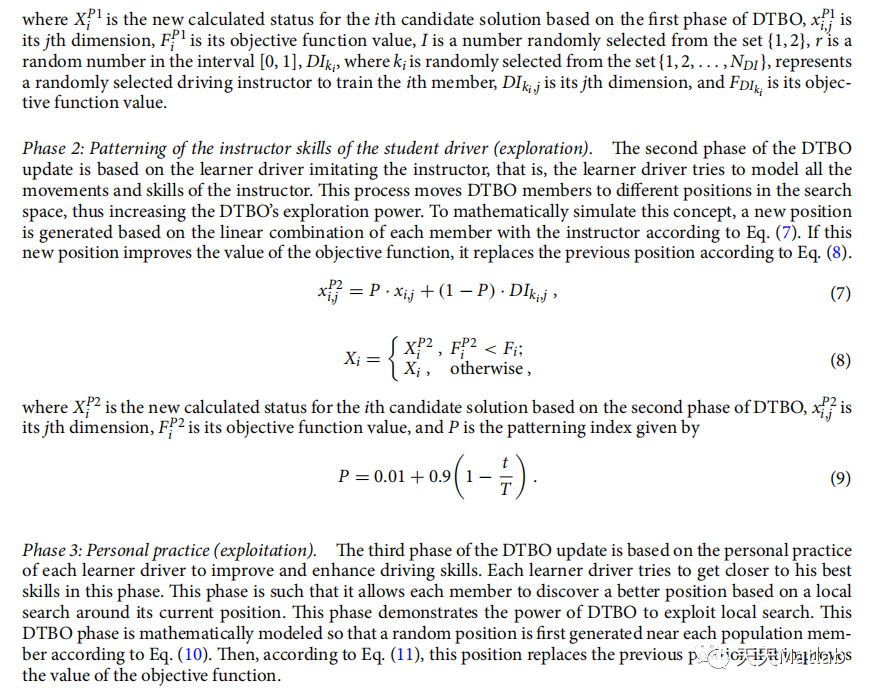
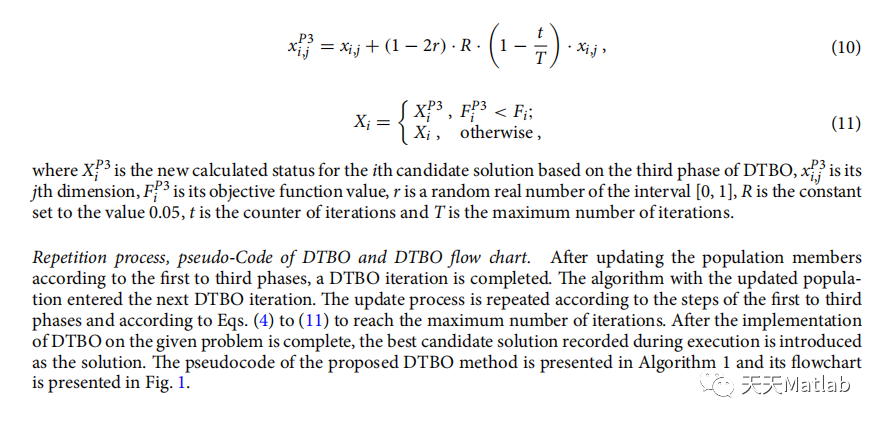
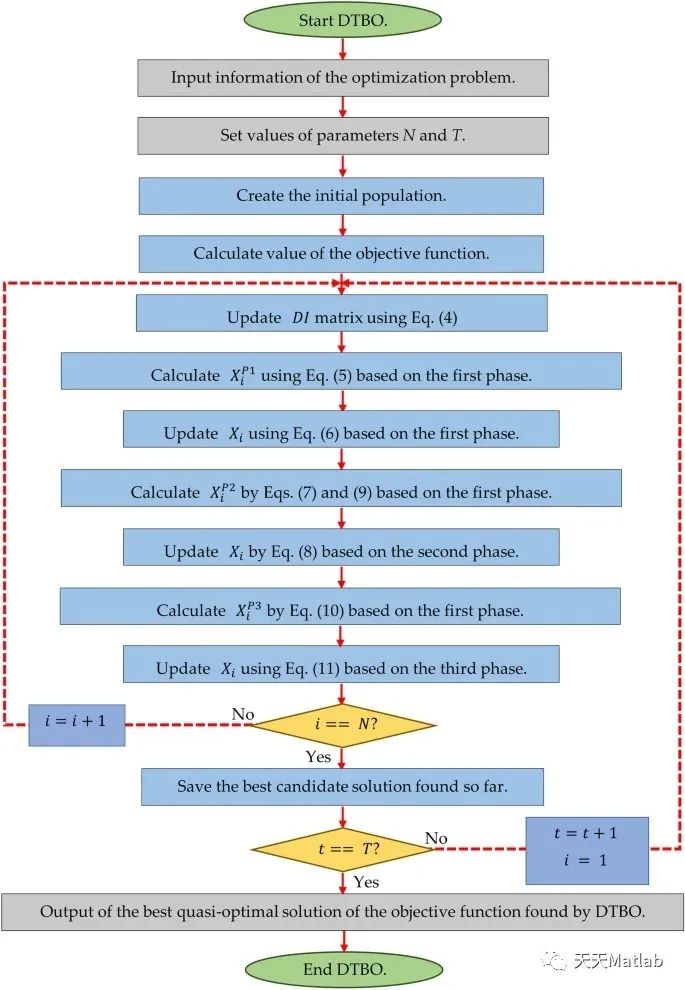
本文介绍了一种新的随机优化算法,称为基于驾驶训练的优化(DTBO),它模仿人类的驾驶训练活动。DTBO设计的根本灵感来自于驾校的驾驶学习过程以及驾驶教练的培训。DTBO 通过三个阶段进行数学建模:(1) 驾驶教练的培训,(2) 根据教练技能对学生进行模式化,以及 (3) 练习。DTBO 在优化方面的性能是在单峰、高维多峰、固定维度多峰和 IEEE CEC2017 测试函数类型的一组 53 个标准目标函数上进行评估的。优化结果表明,DTBO能够通过在探索和利用之间保持适当的平衡,为优化问题提供适当的解决方案。将DTBO的性能质量与11种知名算法的结果进行了比较。仿真结果表明,与 11 种竞争对手算法相比,DTBO 的性能更好,并且在优化应用中更加高效。
⛄ 部分代码
%___________________________________________________________________%Tuna swarm optimization (TSO) %%Developed in MATLAB R2016b %%Author and programmer: Andi Tang %%E-mail: 418932433@qq.com %andisu_afeu@163.com %%Main paper: Tuna swarm optimization: A novel swarm-based %metaheuristic algorithm for global optimization %DOI: 10.1155/2021/9210050 %Computational Intelligence and Neuroscience%%%%___________________________________________________________________%function [lb,ub,dim,fobj] = Get_Functions_details(F)switch Fcase 'F1'fobj = @F1;lb=-100;ub=100;dim=30;case 'F2'fobj = @F2;lb=-10;ub=10;dim=30;case 'F3'fobj = @F3;lb=-100;ub=100;dim=30;case 'F4'fobj = @F4;lb=-100;ub=100;dim=30;case 'F5'fobj = @F5;lb=-30;ub=30;dim=30;case 'F6'fobj = @F6;lb=-100;ub=100;dim=30;case 'F7'fobj = @F7;lb=-1.28;ub=1.28;dim=30;case 'F8'fobj = @F8;lb=-500;ub=500;dim=30;case 'F9'fobj = @F9;lb=-5.12;ub=5.12;dim=30;case 'F10'fobj = @F10;lb=-32;ub=32;dim=30;case 'F11'fobj = @F11;lb=-600;ub=600;dim=30;case 'F12'fobj = @F12;lb=-50;ub=50;dim=30;case 'F13'fobj = @F13;lb=-50;ub=50;dim=30;case 'F14'fobj = @F14;lb=-65.536;ub=65.536;dim=2;case 'F15'fobj = @F15;lb=-5;ub=5;dim=4;case 'F16'fobj = @F16;lb=-5;ub=5;dim=2;case 'F17'fobj = @F17;lb=[-5,0];ub=[10,15];dim=2;case 'F18'fobj = @F18;lb=-2;ub=2;dim=2;case 'F19'fobj = @F19;lb=0;ub=1;dim=3;case 'F20'fobj = @F20;lb=0;ub=1;dim=6;case 'F21'fobj = @F21;lb=0;ub=10;dim=4;case 'F22'fobj = @F22;lb=0;ub=10;dim=4;case 'F23'fobj = @F23;lb=0;ub=10;dim=4;endendF1function o = F1(x)o=sum(x.^2);endF2function o = F2(x)o=sum(abs(x))+prod(abs(x));endF3function o = F3(x)dim=size(x,2);o=0;for i=1:dimo=o+sum(x(1:i))^2;endendF4function o = F4(x)o=max(abs(x));endF5function o = F5(x)dim=size(x,2);o=sum(100*(x(2:dim)-(x(1:dim-1).^2)).^2+(x(1:dim-1)-1).^2);endF6function o = F6(x)o=sum(abs((x+.5)).^2);endF7function o = F7(x)dim=size(x,2);o=sum([1:dim].*(x.^4))+rand;endF8function o = F8(x)o=sum(-x.*sin(sqrt(abs(x))));endF9function o = F9(x)dim=size(x,2);o=sum(x.^2-10*cos(2*pi.*x))+10*dim;endF10function o = F10(x)dim=size(x,2);o=-20*exp(-.2*sqrt(sum(x.^2)/dim))-exp(sum(cos(2*pi.*x))/dim)+20+exp(1);endF11function o = F11(x)dim=size(x,2);o=sum(x.^2)/4000-prod(cos(x./sqrt([1:dim])))+1;endF12function o = F12(x)dim=size(x,2);o=(pi/dim)*(10*((sin(pi*(1+(x(1)+1)/4)))^2)+sum((((x(1:dim-1)+1)./4).^2).*...:dim)+1)./4)))).^2))+((x(dim)+1)/4)^2)+sum(Ufun(x,10,100,4));endF13function o = F13(x)dim=size(x,2);o=.1*((sin(3*pi*x(1)))^2+sum((x(1:dim-1)-1).^2.*(1+(sin(3.*pi.*x(2:dim))).^2))+...((x(dim)-1)^2)*(1+(sin(2*pi*x(dim)))^2))+sum(Ufun(x,5,100,4));endF14function o = F14(x)aS=[-32 -16 0 16 32 -32 -16 0 16 32 -32 -16 0 16 32 -32 -16 0 16 32 -32 -16 0 16 32;,...-32 -32 -32 -32 -16 -16 -16 -16 -16 0 0 0 0 0 16 16 16 16 16 32 32 32 32 32];for j=1:25=sum((x'-aS(:,j)).^6);endo=(1/500+sum(1./([1:25]+bS))).^(-1);endF15function o = F15(x)aK=[.1957 .1947 .1735 .16 .0844 .0627 .0456 .0342 .0323 .0235 .0246];bK=[.25 .5 1 2 4 6 8 10 12 14 16];bK=1./bK;o=sum((aK-((x(1).*(bK.^2+x(2).*bK))./(bK.^2+x(3).*bK+x(4)))).^2);endF16function o = F16(x)o=4*(x(1)^2)-2.1*(x(1)^4)+(x(1)^6)/3+x(1)*x(2)-4*(x(2)^2)+4*(x(2)^4);endF17function o = F17(x)o=(x(2)-(x(1)^2)*5.1/(4*(pi^2))+5/pi*x(1)-6)^2+10*(1-1/(8*pi))*cos(x(1))+10;endF18function o = F18(x)o=(1+(x(1)+x(2)+1)^2*(19-14*x(1)+3*(x(1)^2)-14*x(2)+6*x(1)*x(2)+3*x(2)^2))*...(30+(2*x(1)-3*x(2))^2*(18-32*x(1)+12*(x(1)^2)+48*x(2)-36*x(1)*x(2)+27*(x(2)^2)));endF19function o = F19(x)aH=[3 10 30;.1 10 35;3 10 30;.1 10 35];cH=[1 1.2 3 3.2];pH=[.3689 .117 .2673;.4699 .4387 .747;.1091 .8732 .5547;.03815 .5743 .8828];o=0;for i=1:4o=o-cH(i)*exp(-(sum(aH(i,:).*((x-pH(i,:)).^2))));endendF20function o = F20(x)aH=[10 3 17 3.5 1.7 8;.05 10 17 .1 8 14;3 3.5 1.7 10 17 8;17 8 .05 10 .1 14];cH=[1 1.2 3 3.2];pH=[.1312 .1696 .5569 .0124 .8283 .5886;.2329 .4135 .8307 .3736 .1004 .9991;....1415 .3522 .2883 .3047 .6650;.4047 .8828 .8732 .5743 .1091 .0381];o=0;for i=1:4o=o-cH(i)*exp(-(sum(aH(i,:).*((x-pH(i,:)).^2))));endendF21function o = F21(x)aSH=[4 4 4 4;1 1 1 1;8 8 8 8;6 6 6 6;3 7 3 7;2 9 2 9;5 5 3 3;8 1 8 1;6 2 6 2;7 3.6 7 3.6];cSH=[.1 .2 .2 .4 .4 .6 .3 .7 .5 .5];o=0;for i=1:5o=o-((x-aSH(i,:))*(x-aSH(i,:))'+cSH(i))^(-1);endendF22function o = F22(x)aSH=[4 4 4 4;1 1 1 1;8 8 8 8;6 6 6 6;3 7 3 7;2 9 2 9;5 5 3 3;8 1 8 1;6 2 6 2;7 3.6 7 3.6];cSH=[.1 .2 .2 .4 .4 .6 .3 .7 .5 .5];o=0;for i=1:7o=o-((x-aSH(i,:))*(x-aSH(i,:))'+cSH(i))^(-1);endendF23function o = F23(x)aSH=[4 4 4 4;1 1 1 1;8 8 8 8;6 6 6 6;3 7 3 7;2 9 2 9;5 5 3 3;8 1 8 1;6 2 6 2;7 3.6 7 3.6];cSH=[.1 .2 .2 .4 .4 .6 .3 .7 .5 .5];o=0;for i=1:10o=o-((x-aSH(i,:))*(x-aSH(i,:))'+cSH(i))^(-1);endendfunction o=Ufun(x,a,k,m)o=k.*((x-a).^m).*(x>a)+k.*((-x-a).^m).*(x<(-a));end
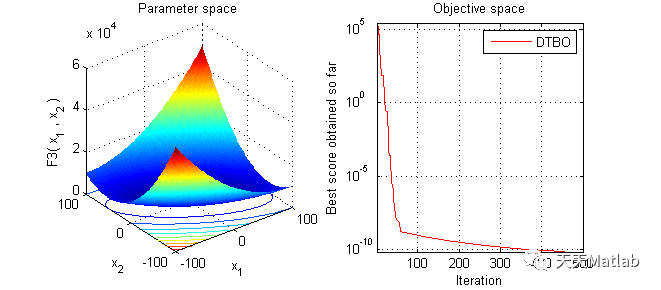
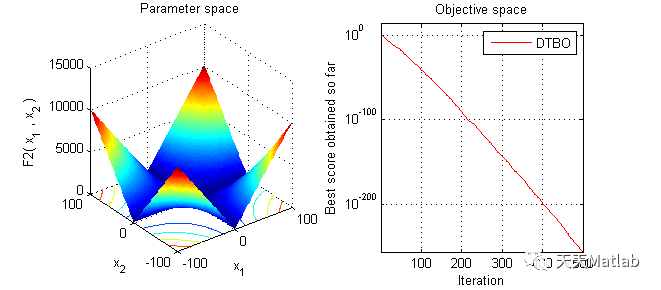
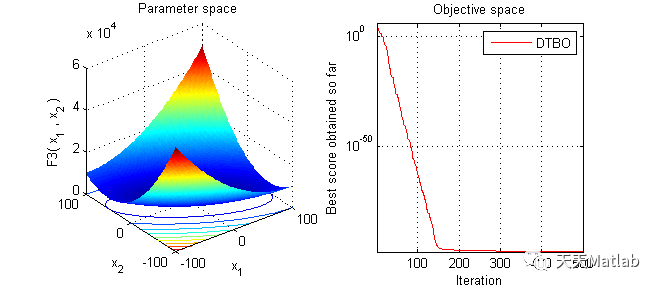
⛄ 运行结果
⛄ 参考文献
Mohammad Dehghani, Eva Trojovska, and Pavel Trojovsky. Driving Training-Based Optimization: A New Human-Based Metaheuristic Algorithm for Solving Optimization Problems. Sci Rep (2022).
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
🍅 仿真咨询
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化
2 机器学习和深度学习方面
卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM、XGBOOST、TCN实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
2.图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
3 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划、天线线性阵列分布优化、车间布局优化
4 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配
5 无线传感器定位及布局方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化
6 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化
7 电力系统方面
微电网优化、无功优化、配电网重构、储能配置
8 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长
9 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢