
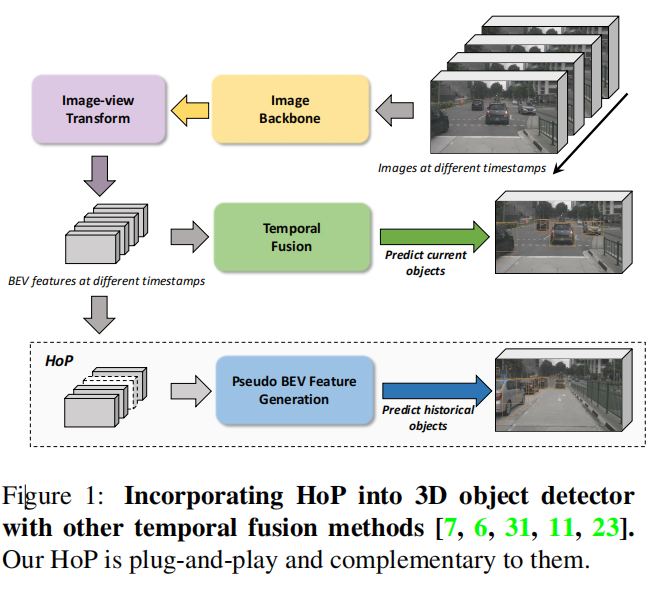
前言 本文介绍了一种新的范式,称为历史对象预测 (HoP),用于多视图 3D 检测,以更有效地利用时间信息。HoP 方法很简单:给定当前时间戳 t,从其相邻帧生成时间戳 t-k 的伪鸟瞰图 (BEV) 特征,并利用该特征来预测时间戳 t-k 处的对象集。我们的方法的动机是观察到强制检测器捕获历史时间戳发生的物体的空间位置和时间运动可以导致更准确的 BEV 特征学习。首先设计了短期和长期时间解码器,它可以生成时间戳 t-k 的伪 BEV 特征,而无需涉及其相应的相机图像。其次,灵活附加一个额外的目标解码器,以使用生成的伪 BEV 特征来预测对象目标。
论文:IROS 2023 https://arxiv.org/abs/2304.00967
作者单位:SenseTime Research, The University of Hong Kong

相关工作
多视角 3D 检测
用于 3D 检测的现代多视图方法主要分为两个分支:基于 LSS 的方法和基于查询的方法。BEVDet 是基于LSS 的方法中的代表性方法。遵循 Lift-Splat-Shoot 范式,该方法首先显式估计每个图像像素的深度,然后根据深度将 2D 特征提升到 3D 体素,最后将 3D 特征映射到 BEV 特征并对其进行目标检测。BEVDepth 进一步改进了具有显式深度监督的视图转换模块。基于查询的方法通常采用可学习的查询,通过注意力机制来聚合 2D 图像特征。DETR3D 利用对象查询来预测 3D 位置并将其投影回 2D 坐标以获得相应的特征。Graph-DETR3D 和 Sparse4D分别通过可学习的 3D 图和稀疏 4D 采样对其进行了增强。PETR 将 3D 位置编码为图像特征,因此可以直接使用全局 2D 特征进行查询。BEVFormer利用网格状 BEV 查询通过可变形注意力与 2D 特征进行交互;在此基础上,BEVFormerv2引入了透视监督。此外,PolarFormer 和 Ego3RT 主张在极坐标中对 BEV 查询进行建模以适应现实世界的场景。
多视图 3D 检测的时间建模
人们越来越多地探索自动驾驶场景中的运动信息,以利用时间线索来提高最近 3D 感知框架中的检测性能。BEVFormer 提出了时间自注意力机制,以 RNN 方式通过可变形注意力动态融合先前的 BEV 特征。BEVDet4D 引入了时间建模,将 BEVDet 提升到时空 4D 空间。PETR中的3D位置嵌入(3D PE)由PETRv2通过时间 对齐进行扩展。BEVstereo 和 STS 都利用时间视图通过有效的时间立体方法构建多视图立体。SOLOFusion充分利用了短期和长期时间信息的协同作用,这种信息高度互补,并实现了最先进的性能。BEVFormerV2使用双向时间编码器来利用历史和未来的 BEV 特征,大幅提高性能。与上述工作相比,我们提供了一种新颖的时间增强训练范例来改进时间建模,而无需额外的推理成本。
主要贡献
• 我们提出了一种新颖的时间增强训练方案,即历史对象预测(HoP),以鼓励更准确的BEV 特征学习。HoP 可以迫使模型在训练过程中捕获历史框架中对象的空间语义和时间运动。
• 我们设计了一个由短期解码器和长期解码器组成的时间解码器,以提供可靠的空间定位和准确的物体运动估计。
• 我们用我们的方法装备了具有竞争力的3D 检测器基线,并在nuScenes 数据集上取得了重大改进。令人惊讶的是,采用 ViT L 的 HoP 在 nuScenes 测试中实现了 68.5% NDS 和 62.4% mAP,确立了新的最先进性能。
方法设计
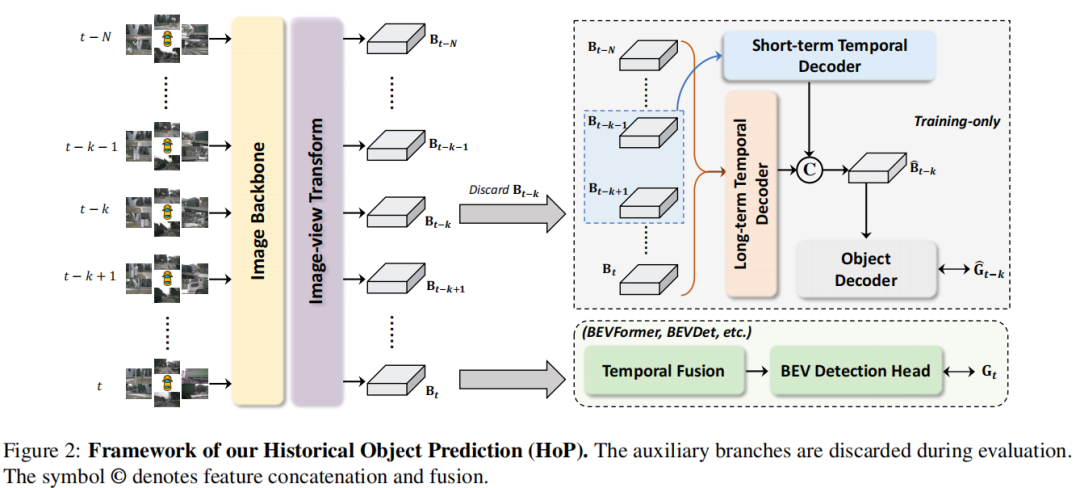
图 2:我们的历史对象预测 (HoP) 框架,评估期间辅助分支被丢弃。符号©表示特征串联和融合。
Historical Object Prediction(历史目标预测)
Short-term temporal decoder(短期时间解码器) 由于相邻帧之间的高时间相关性,短期时间解码器仅对相邻的 BEV 特征集进行操作,在 BEV 空间中构建详细的空间表示。
Long-term temporal decoder(长期时间解码器) 长期时间解码器处理整个剩余的 BEV 集,以感知长期历史上的运动线索,这增加了定位潜力并有助于更准确的定位。因此,时间解码器中的这两个分支是互补的。对于长期运动,直观上我们只关注鸟瞰图中相同物体的空间运动,而忽略了物体的高度信息。对于大多数具有 2D BEV 特征的 3D 物体检测器(例如 BEVFormer 和 BEVDet),高度信息已被展平为特征嵌入。因此,我们首先对输入进行通道缩减操作来修剪高度信息并获得更好的训练效率。
最后,我们连接短期和长期 BEV 功能和执行功能通过3×3卷积进行融合。
Object decoder(对象解码器) 重建的 BEV 特征由轻量级目标解码器进一步处理。解码器用于根据 BEV 特征生成 3D 预测,因此其实现非常灵活。BEV 检测头的变体是显而易见的选择,我们将在实验中考虑多个实例。
Historical Temporal Query Fusion(历史时态查询融合)
除了利用 BEV 特征级别的时态信息的 HoP 方法之外,我们还通过将历史目标查询融合到当前查询中,探索基于查询的方法(例如 BEV 前)中的查询级时态建模。该融合步骤为当前查询提供了历史感知的初始化,形成了精炼过程。
如图 2 所示,HoP 可以轻松集成到许多多视图 3D 检测器中,例如 BEVFormer 和 BEVDet4D-Depth。我们将先前帧的外在参数转换到当前自我的坐标系,以按照 BEVDet 执行时间对齐。
实验结果
Main Results
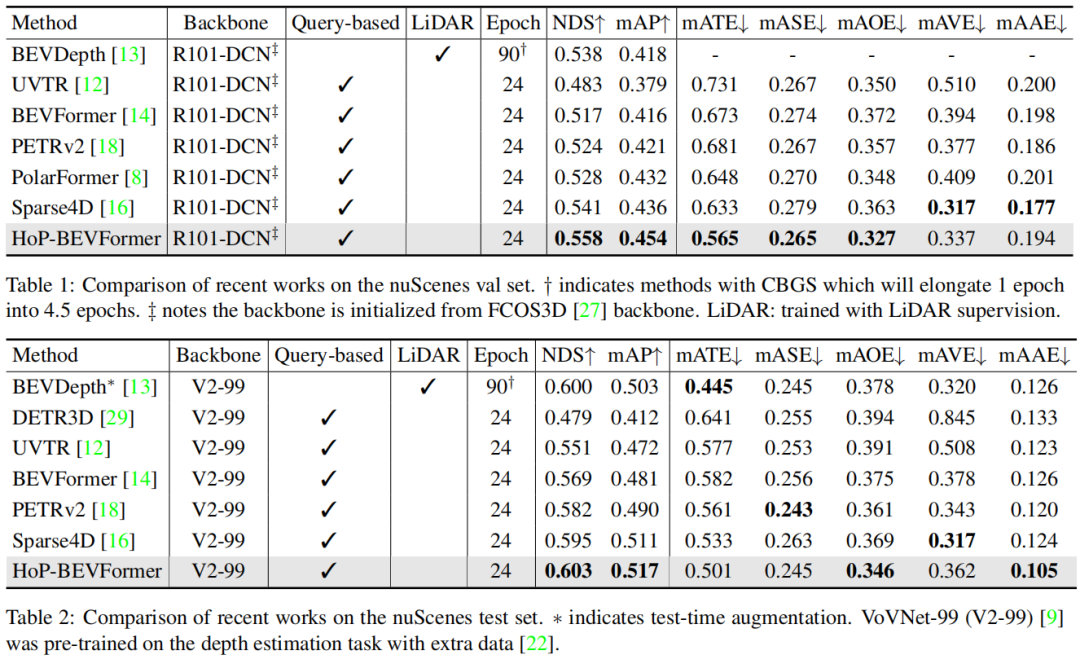
为了与以前最先进的 3D 目标检测方法进行比较,我们采用从 FCOS3D 初始化的 ResNet101-DCN 和从 DD3D 的 VoVNet-99 checkpoint。我们还将输入分辨率放大到 1600×640 并使用 1500 个目标查询。表 1 和表 2 采用了历史时间查询融合。我们在表 1 和表 2 中报告了我们的 HoP 与 ResNet101-DCN 主干网在 nuScenes val 上的结果以及HoP 与 V2-99 主干网在 nuScenes test 上的结果。表 3 为nuScenes camera-only 3D detection排行榜。

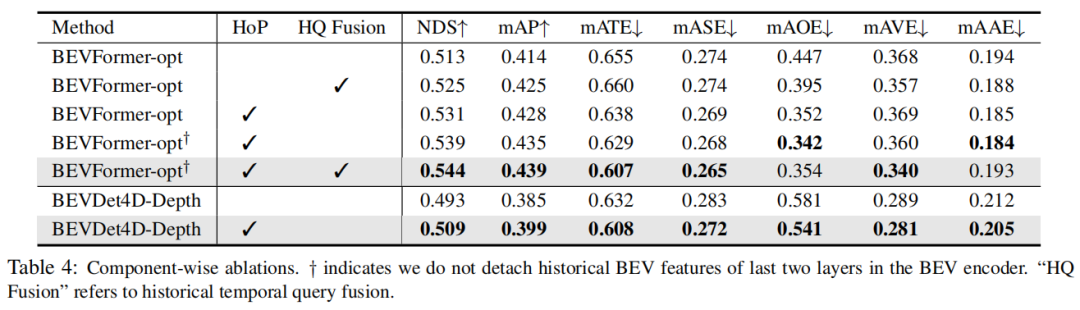
Ablation Studies
Visualization
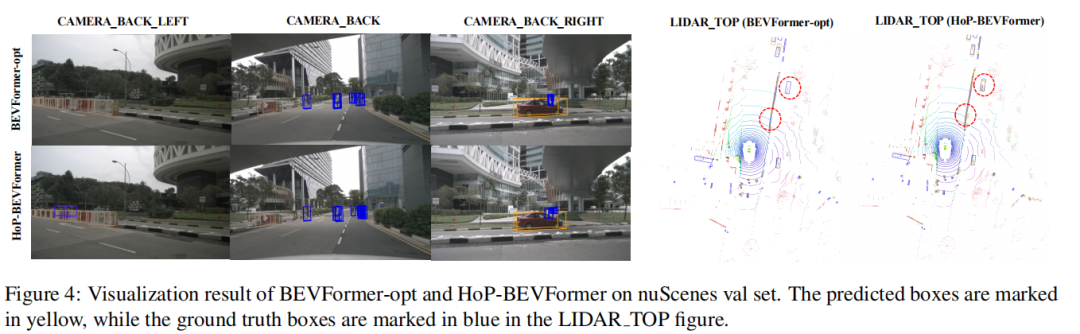
图 4 显示了基线方法 BEVFormer-opt 和我们提出的 HoP BEVFormer 的检测结果。在 LI DAR TOP 图中,预测标记为黄色,而地面实况框标记为蓝色。我们观察到,HoP-BEVFormer 凭借出色的聚合时间信息的能力,成功地检测到小物体或被遮挡的物体。
结论
在本文中,我们提出了一种新的范例,称为历史目标预测(HoP),用于多视图 3D 检测,以更有效地利用时间信息。HoP 方法很简单:给定当前时间戳 t,我们从其相邻帧生成时间戳 t-k 的伪 BEV 特征,并利用该特征来预测时间戳 t-k 处的对象集。首先,我们精心设计了短期和长期时间解码器,它可以生成时间戳 t-k 的伪 BEV 特征,而无需涉及其相应的相机图像。其次,灵活附加一个额外的对象解码器,以使用生成的伪 BEV 特征来预测目标。作为一种即插即用的方法,HoP 可以轻松集成到最先进的 BEV 检测框架中,包括 BEVFormer 和 BEVDet 系列。进行了大量的实验来评估所提出的 HoP 在 nuScenes 数据集上的有效性。令人惊讶的是,HoP 在 nuScenes 测试中实现了 68.5% NDS 和 62.4% mAP,明显优于排行榜上的所有 3D 物体检测器。
若觉得还不错的话,请点个 “赞” 或 “在看” 吧


内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢