
计算机视觉研究院专栏
作者:Edison_G
目标检测发展已经到了一个瓶颈,但是依然有很多优秀的产出,比如最近比较火热的“Anchor—Free”,貌似在该机制下精度有一定程度的提升,今天博主基于之前积累的知识,为大家分享基于Anchor的优化,主要涉及动态特征选择Anchor,增加深度特征的表示,最终精度大幅度提升。
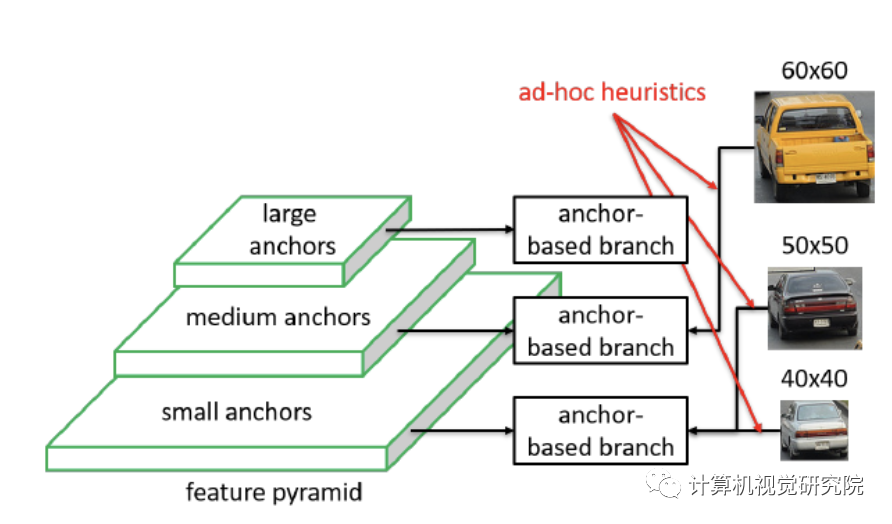
所以Anchor的设计对One-Stage网络的性能至关重要!
就如上述所说,ARM被提出来调整默认anchor的初始化,为检测器提供了更好的anchor参考。然而,这个模块带来了另一个问题:特征映射中的所有像素都具有相同的感受野,而与每个像素相关联的anchor具有不同的位置和大小。这种不一致可能导致不太有效的检测结果。
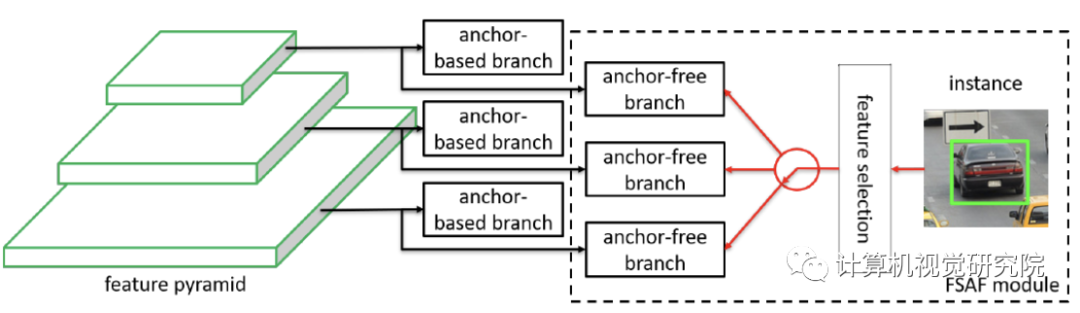
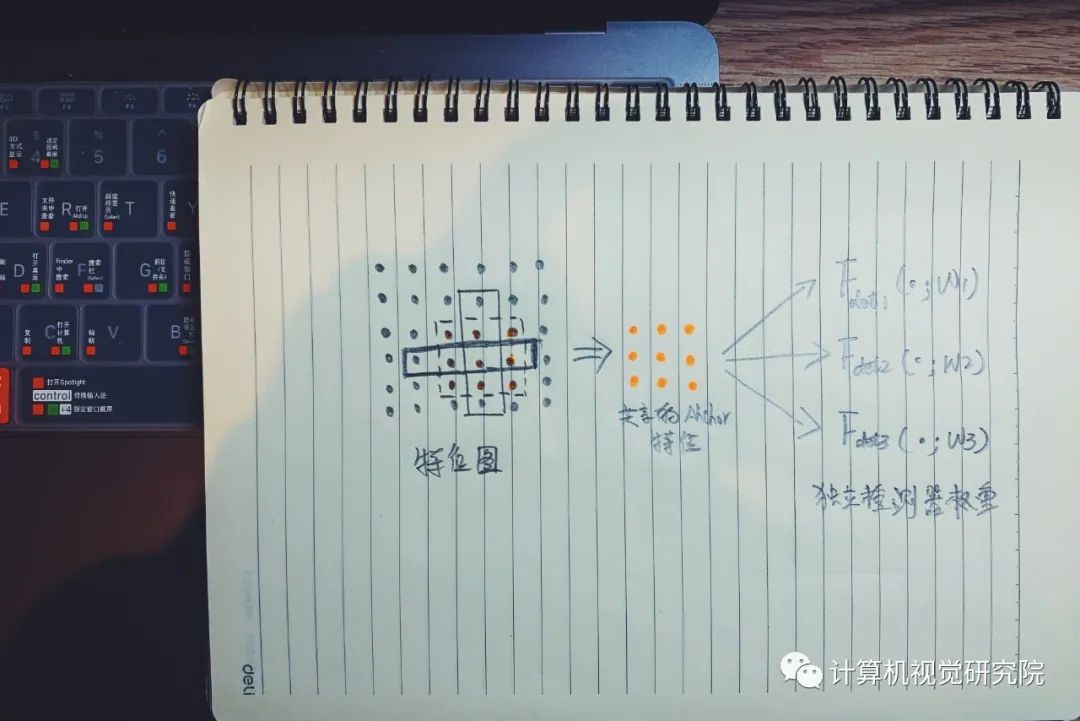
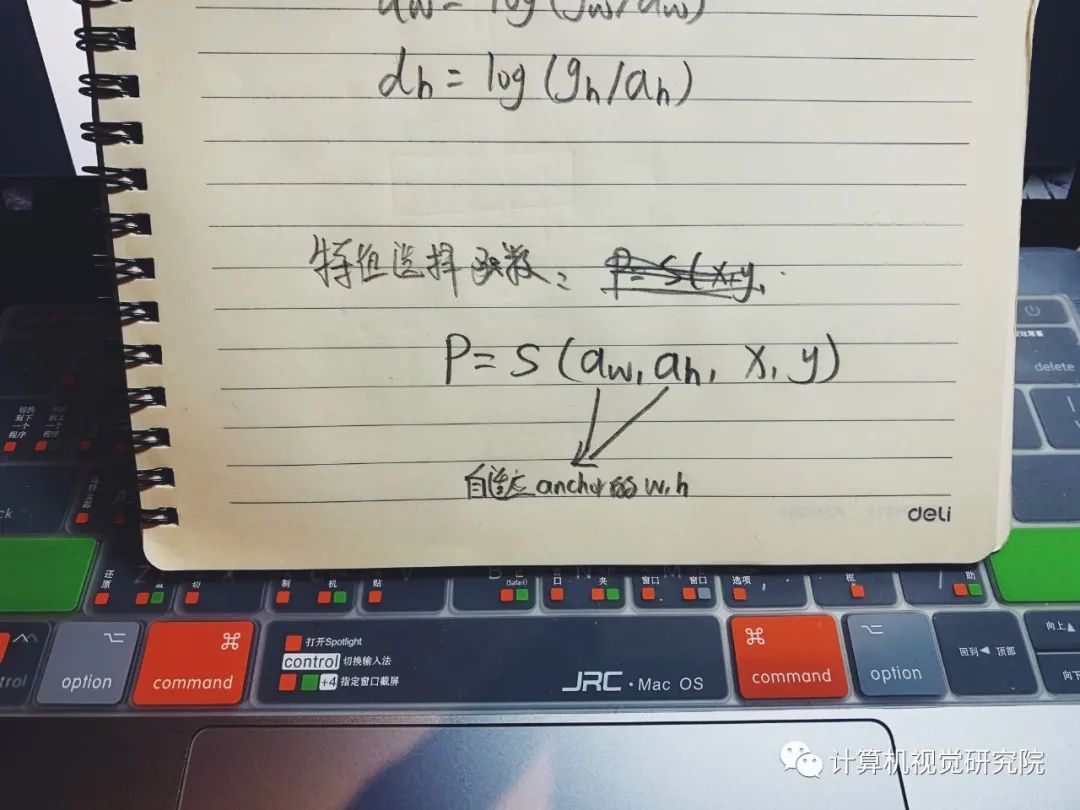
于是,我想是不是应该有一个动态特征选择操作,在一个特征映射中选择新的像素,从中获取最佳的anchor。根据新的anchor点位置和大小选择像素,使这些像素的感受野能够很好地适应anchor区域,这使得检测器,特别是回归部分更容易优化。此外,为了提高所选特征像素的表达能力,还设计了一个双向特征融合模块,将早期和深层特征相结合。
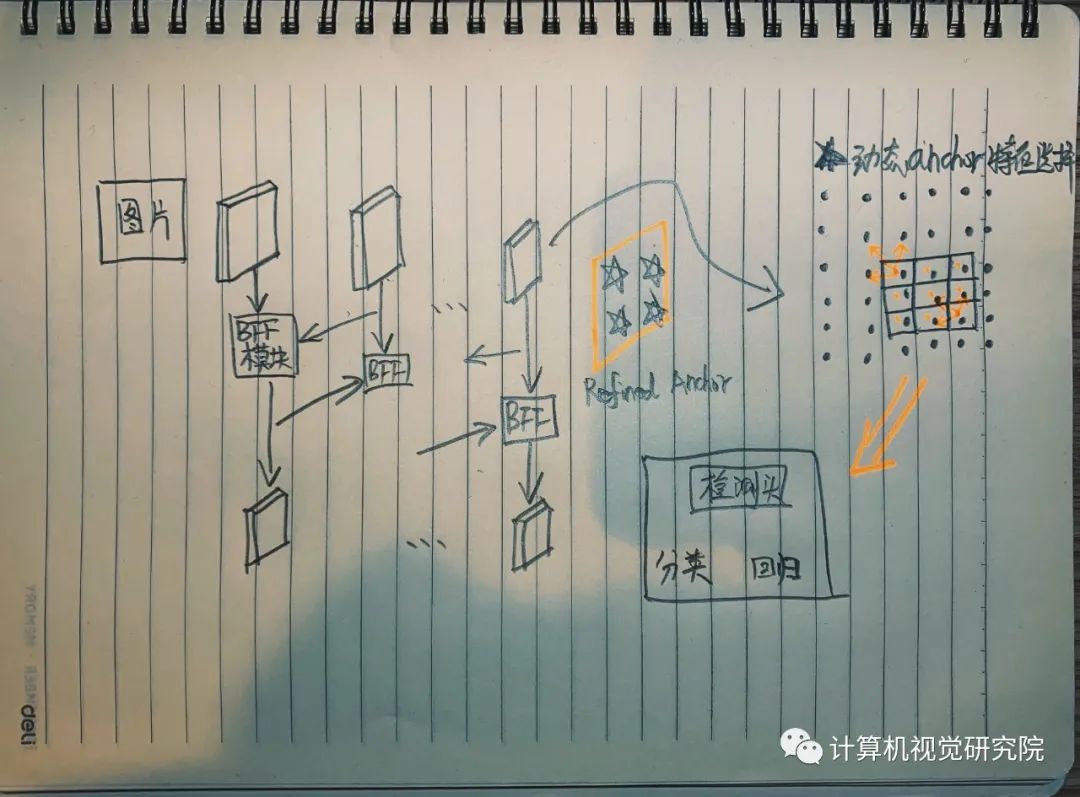
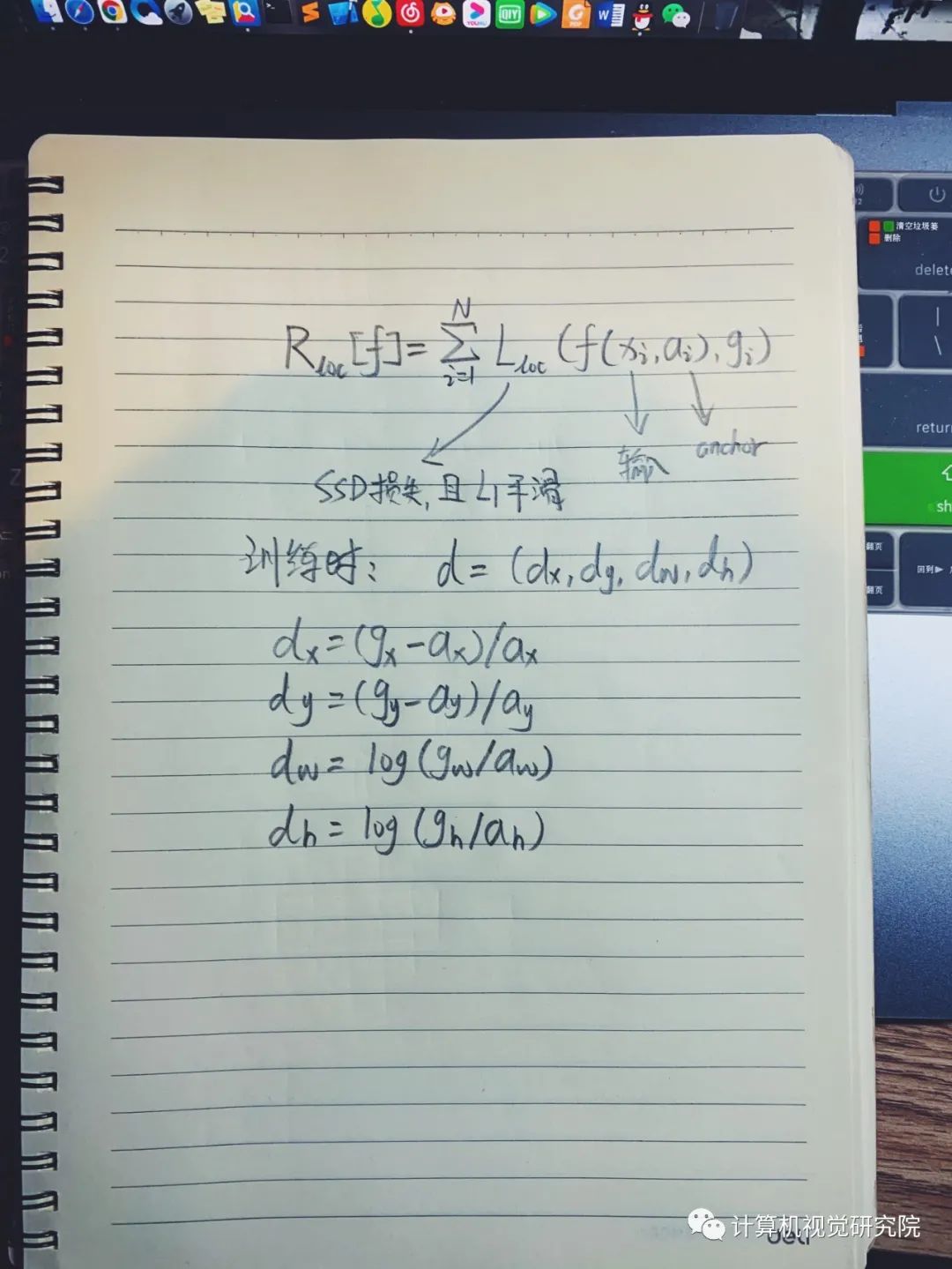
ARM是One-Stage检测器中使用的类似RPN模块,是[Shifeng Zhang, Longyin Wen, Xiao Bian, Zhen Lei, and Stan Z Li. Single-shot refinement neural network for object detection. In Proceedings of the IEEE conference on computer vision and pattern recognition, 2018]首先提出的。它在多尺度检测框架下,在每个 detection source layer上附加两个卷积核。ARM的主要目的是为每个anchor分配背景/前景分数和预测调整的位置。利用二进制分类分数筛选出负样本,并将细化的anchor发送到最终的目标检测模块(ODM),与SSD中的检测器头完全相同。为了更好地分析ARM对探测器的影响,首先给出了探测器头的边界框回归和分类的定义。


转载请联系本公众号获得授权

计算机视觉研究院学习群等你加入!
ABOUT
计算机视觉研究院

往期推荐
🔗
小米平板6 Max-Yolo:在便携终端上实时检测不再是难题 机场项目:解决飞行物空间大小/纵横比、速度、遮挡等问题引起的实时目标检测问题 旋转角度目标检测的重要性!!!(附源论文下载) PE-YOLO:解决黑夜中的目标检测难点 YOLO-S:小目标检测的轻量级、精确的类YOLO网络 EdgeYOLO:边缘设备上实时运行的目标检测器及Pytorch实现 Q-YOLO:用于实时目标检测的高效推理 Yolo算法的演进—YoloCS有效降低特征图空间复杂度(附论文下载) InternImage:探索具有可变形卷积的大规模视觉基础模型 首个全量化Vision Transformer的方法FQ-ViT,AI大模型落地不远了! YoloV8与ChatGPT互通,这功能是真的强大!
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢