

✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
1.1 灰狼算法
灰狼优化算法(Grey Wolf Optimization Algorithm, GWO)是一种基于自然界灰狼群体行为的优化算法,其基本思想是通过模拟灰狼在群体中的协作行为,寻找最优解。下面是灰狼优化算法的基本流程:
初始化灰狼群体。随机生成一定数量的灰狼,每个灰狼的位置代表一个解,初始时需要在解空间内随机生成。
计算每个灰狼的适应度。对于每个灰狼的位置,计算其对应的目标函数值,作为灰狼的适应度。
确定群体中的Alpha、Beta和Delta。根据灰狼的适应度,确定群体中适应度最高的Alpha灰狼、适应度次高的Beta灰狼和适应度第三高的Delta灰狼。
更新灰狼位置。对于每个灰狼,根据Alpha、Beta和Delta灰狼的位置,更新其位置。具体来说,可以使用以下公式:
a = 2 * A * r1 - A C1 = 2 * r2 p = rand() if p < 0.5: if abs(a) >= 1: x_new = Alpha_pos - a * abs(C1 * Alpha_pos - X[i]) else: x_new = Alpha_pos - a * abs(C1 * Alpha_pos - X[i]) + delta * randn(1, D) else: x_new = (Alpha_pos + Beta_pos) / 2
其中,A为一个缩放因子,r1、r2为0~1之间的随机数,D为解的维度,delta为一个随机扰动项,randn()为标准正态分布。
判断是否满足停止条件。如果满足停止条件,算法结束,否则返回步骤2继续迭代。
1.2 模型
无线传感器网络(Wireless Sensor Network,WSN)是由大量分散的、无线连接的、具有感知、处理、通信和控制能力的小型节点组成的网络系统。这些节点可以用来感知环境变化、监测目标行为、执行任务控制等。
无线传感器网络的覆盖问题是指如何使得网络中的每个目标区域都被至少一个传感器节点所覆盖。覆盖问题是WSN中的一个基本问题,它直接影响着网络的能效、数据传输质量和目标监测能力等。
传统的覆盖问题主要考虑节点的位置和范围,通过调整节点的布局和传感器的参数来达到覆盖的目的。但是随着无线传感器网络的发展,覆盖问题也变得更加复杂。例如,节点能量有限、网络拓扑结构动态变化、传感器参数难以调节等问题都会影响网络的覆盖效果。
⛄ 部分代码
clc
clear all
close all
% 初始化参数
n_pop = 50; % 种群数量
n_iterations = 2000; % 迭代次数
% 参数设置
n_sensors = 200; % 传感器数量
sensor_range = 10; % 传感器覆盖半径
fixed_angle = pi/3; % 固定感知角度
area_ub = [100, 100]; % 区域上限
area_lb = [0, 0]; % 区域下限
% 生成随机传感器位置
sensor_positions = unifrnd(area_lb(1), area_ub(1), n_sensors, 2);
% 优化变量: 每个传感器的主感知方向(角度)
n_var = n_sensors; % 变量数量
ub = pi; % 上限
lb = 0; % 下限
% 灰狼优化算法
% 初始化种群
pop = repmat(struct('position', [], 'cost', []), n_pop, 1);
for i = 1:n_pop
pop(i).position = unifrnd(lb, ub, 1, n_var);
pop(i).cost = CostFunction(sensor_positions, pop(i).position);
end
% 初始化Alpha、Beta、Delta
[~, alpha_index] = min([pop.cost]);
alpha = pop(alpha_index);
[~, beta_index] = max([pop.cost]);
beta = pop(beta_index);
delta = pop(3);
alpha_history = repmat(struct('position', [], 'cost', []), n_iterations, 1);
% 迭代
for t = 1:n_iterations
a = 2 - t * (2 / n_iterations);
for i = 1:n_pop
% 更新位置
new_position = UpdatePosition(pop(i).position, alpha.position, a);
new_position = UpdatePosition(new_position, beta.position, a);
new_position = UpdatePosition(new_position, delta.position, a);
% 边界检查
new_position = max(new_position, lb);
new_position = min(new_position, ub);
% 计算新成本
new_cost = CostFunction(new_position);
% 更新种群成员
if new_cost < pop(i).cost
pop(i).position = new_position;
pop(i).cost = new_cost;
end
end
% 更新Alpha、Beta、Delta
[~, alpha_index] = min([pop.cost]);
alpha = pop(alpha_index);
[~, beta_index] = max([pop.cost]);
beta = pop(beta_index);
delta = pop(3);
alpha_history(t) = alpha;
end
% 计算最优解的覆盖面积
best_positions = sensor_positions;
best_angles = alpha.position;
best_coverage_area = -alpha.cost;
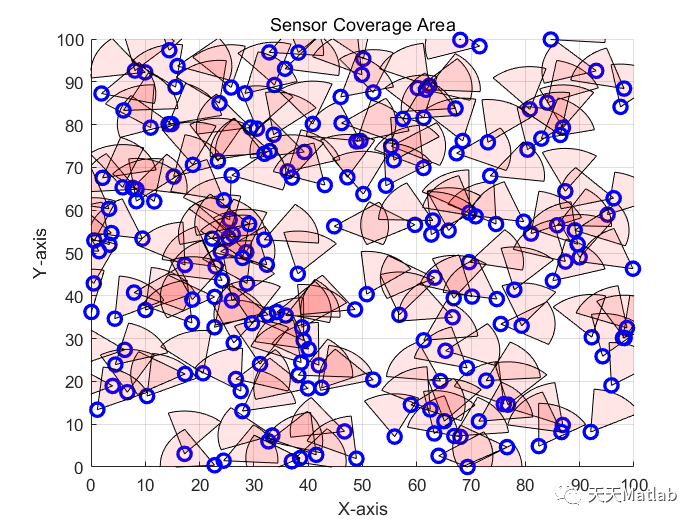
%绘制覆盖面积图
figure;
hold on;
axis([area_lb(1), area_ub(1), area_lb(2), area_ub(2)]);
for i = 1:n_sensors
% 计算扇形区域的边界点
angle_range = linspace(-fixed_angle/2, fixed_angle/2, 100);
x_boundary = best_positions(i, 1) + sensor_range * cos(angle_range + best_angles(i));
y_boundary = best_positions(i, 2) + sensor_range * sin(angle_range + best_angles(i));
% 绘制扇形区域
fill([best_positions(i, 1), x_boundary], [best_positions(i, 2), y_boundary], 'r', 'FaceAlpha', 0.1);
% 绘制传感器位置
plot(best_positions(i, 1), best_positions(i, 2), 'bo', 'MarkerSize', 8, 'LineWidth', 2);
end
title('Sensor Coverage Area');
xlabel('X-axis');
ylabel('Y-axis');
grid on;
hold off;
⛄ 运行结果
⛄ 参考文献
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢