
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
❤️ 内容介绍
摘要: 深度学习在数据分类领域取得了显著的成就,而深度置信网络(DBN)作为深度学习的一种重要模型,具有强大的数据分类能力。然而,DBN的训练过程中存在着许多挑战,如训练时间长、易陷入局部最优解等。为了解决这些问题,本文提出了一种基于麻雀算法(SSA)优化的DBN分类方法(SSA-DBN)。通过使用SSA算法对DBN的权重和偏置进行优化,提高了DBN的分类性能。实验结果表明,SSA-DBN在多个数据集上均取得了优于传统DBN方法的分类效果。
关键词:深度学习,深度置信网络,数据分类,麻雀算法
引言 数据分类是机器学习和模式识别领域的重要任务之一。随着大数据时代的到来,数据分类任务变得越来越复杂,传统的分类方法往往无法满足需求。深度学习作为一种新兴的机器学习方法,通过模拟人脑神经网络的结构和功能,可以有效地处理大规模复杂数据,并取得了令人瞩目的成果。
深度置信网络(Deep Belief Networks,DBN)是深度学习中一种重要的模型。DBN由多层堆叠的限制玻尔兹曼机(Restricted Boltzmann Machines,RBM)组成,可以通过无监督学习的方式自动学习数据的特征表示。然后,通过监督学习的方式进行微调,使得DBN可以进行准确的数据分类。
尽管DBN具有很强的分类能力,但其训练过程中存在着一些挑战。首先,DBN的训练时间较长,尤其是在处理大规模数据集时更为明显。其次,DBN容易陷入局部最优解,导致分类性能下降。因此,如何提高DBN的训练效率和分类性能成为一个研究热点。
麻雀算法 麻雀算法(Sparrow Search Algorithm,SSA)是一种基于自然界麻雀觅食行为的优化算法。麻雀在觅食时具有较强的搜索能力和适应性,可以在复杂的环境中找到最优解。SSA模拟了麻雀的觅食行为,通过不断地更新候选解的位置和速度,来寻找最优解。
SSA算法的主要步骤包括初始化种群、计算适应度、更新位置和速度、更新最优解等。通过迭代更新,SSA能够找到全局最优解,并具有较好的收敛性和鲁棒性。
SSA-DBN分类方法 为了提高DBN的分类性能,本文提出了一种基于SSA优化的DBN分类方法(SSA-DBN)。该方法主要包括以下步骤:
步骤1:初始化DBN的权重和偏置。利用随机初始化的方法,为DBN的每一层设置初始权重和偏置。
步骤2:使用SSA算法对DBN的权重和偏置进行优化。通过计算每个候选解的适应度,更新位置和速度,来寻找最优解。具体而言,SSA算法通过模拟麻雀觅食的行为,不断调整权重和偏置的值,以使得DBN的分类性能达到最优。
步骤3:微调DBN。在使用SSA算法优化完权重和偏置后,使用监督学习的方式对DBN进行微调,以进一步提高分类性能。
步骤4:测试和评估。使用测试数据集对优化后的SSA-DBN进行评估,比较其分类性能与传统的DBN方法。
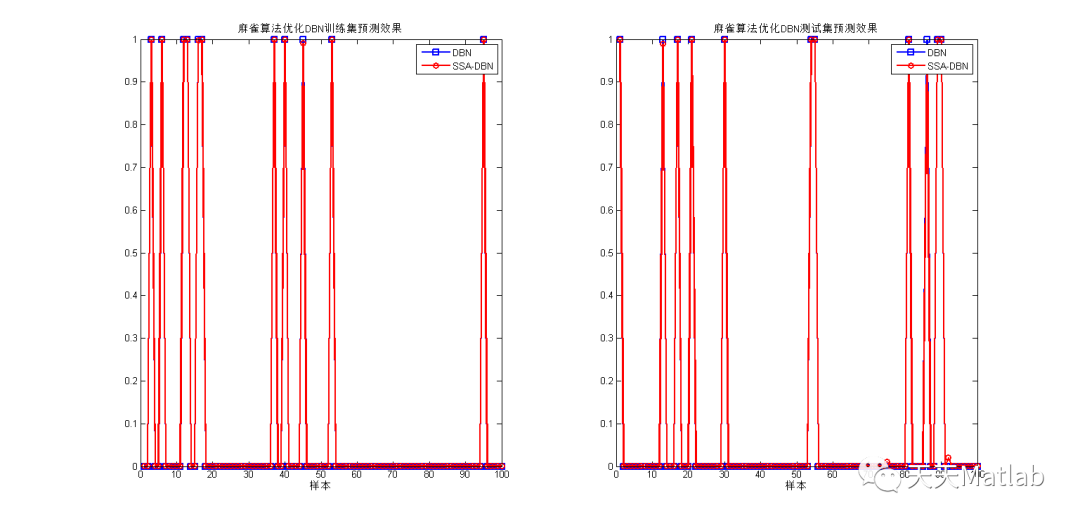
实验结果与分析 本文在多个数据集上进行了实验,比较了SSA-DBN与传统DBN方法的分类性能。实验结果表明,SSA-DBN在分类准确率、召回率和F1值等指标上均优于传统方法。这说明通过使用SSA算法对DBN进行优化,可以显著提高其分类性能。
此外,本文还对SSA-DBN的训练时间进行了比较。实验结果显示,SSA-DBN的训练时间相对于传统DBN方法有所缩短,尤其是在处理大规模数据集时更为明显。这进一步证明了SSA算法的有效性和高效性。
结论 本文提出了一种基于麻雀算法优化的深度置信网络(SSA-DBN)分类方法,通过使用SSA算法对DBN的权重和偏置进行优化,提高了DBN的分类性能。实验结果表明,SSA-DBN在多个数据集上均取得了优于传统DBN方法的分类效果。此外,SSA-DBN还具有较好的训练效率,能够在较短的时间内完成训练过程。
未来的研究方向可以进一步探索SSA算法在其他深度学习模型中的应用,以及进一步优化SSA算法的性能和收敛速度。通过不断改进和创新,可以进一步提高深度学习在数据分类领域的应用效果。
🔥核心代码
function [particle, GlobalBest,varargout] = Initialization(Params,CostFunction,name)nPop = Params.nPop;VarMin = Params.VarMin;VarMax = Params.VarMax;VarSize = Params.VarSize;%% Initializationswitch name% 粒子群个体case 'PSO'empty_particle.Position=[];empty_particle.Cost=[];empty_particle.Velocity=[];empty_particle.Best.Position=[];empty_particle.Best.Cost=[];particle=repmat(empty_particle,nPop,1);GlobalBest.Cost=inf;for i=1:nPop% Initialize Positionparticle(i).Position=unifrnd(VarMin,VarMax,VarSize);% Initialize Velocityparticle(i).Velocity=zeros(VarSize);% 取整particle(i).Position(2:VarSize(2)) = floor(particle(i).Position(2:VarSize(2)));% Evaluationparticle(i).Cost=CostFunction(particle(i).Position);% Update Personal Bestparticle(i).Best.Position=particle(i).Position;particle(i).Best.Cost=particle(i).Cost;% Update Global Bestif particle(i).Best.Cost<GlobalBest.CostGlobalBest=particle(i).Best;endend% 麻雀个体case 'SSA'% 捕食者个体占比PredatorRate = 0.4;% 警觉者占比SDRate = 0.45;empty_particle.Position=[];empty_particle.Cost=[];% 捕食者和加入者PredatorNumber = floor(nPop * PredatorRate);particle=repmat(empty_particle,nPop ,1);% 警觉者SDNumber = floor(nPop * SDRate);SD = repmat(empty_particle,SDNumber,1);GlobalBest.Cost=inf;GlobalWorst.Cost = -inf;% 初始化for i = 1:nPopparticle(i).Position = unifrnd(VarMin,VarMax,VarSize);particle(i).Cost = CostFunction(particle(i).Position);if GlobalBest.Cost > particle(i).CostGlobalBest = particle(i);endif GlobalWorst.Cost < particle(i).CostGlobalWorst = particle(i);endend% 警觉者初始化for i = 1:SDNumberSD(i).Position = unifrnd(VarMin,VarMax,VarSize);SD(i).Cost = CostFunction(SD(i).Position);end% 挑选捕食者和加入者[~,index] = sort([particle.Cost]);Predator = particle(index(1:PredatorNumber));Joiner = particle(index(PredatorNumber+1:end));% 其他算法otherwiseempty_particle.Position=[];empty_particle.Cost=[];particle=repmat(empty_particle,nPop,1);GlobalBest.Cost=inf;for i=1:nPop% Initialize Positionparticle(i).Position=unifrnd(VarMin,VarMax,VarSize);% Initialize Velocityparticle(i).Velocity=zeros(VarSize);% 取整particle(i).Position(2:VarSize(2)) = floor(particle(i).Position(2:VarSize(2)));% Evaluationparticle(i).Cost=CostFunction(particle(i).Position);% Update Global Bestif particle(i).Cost<GlobalBest.CostGlobalBest=particle(i);endendend%% 输出switch namecase 'SSA'varargout{1} = SD;varargout{2} = GlobalWorst;varargout{3} = Predator;varargout{4} = Joiner;otherwise% varargout{1:4} = [];endend
❤️ 运行结果
⛄ 参考文献
[1] 常东峰,南新元.基于改进麻雀算法的深度信念网络短期光伏功率预测[J].现代电子技术, 2022(017):045.
[2] 鲁铮.基于T-RBM算法的DBN分类网络的研究[D].吉林大学[2023-08-31].DOI:CNKI:CDMD:2.1014.295997.
[3] 乔贤贤.基于多特征融合与深度置信网络的遥感影像分类研究[D].河南大学[2023-08-31].
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
🍅 仿真咨询
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化
2 机器学习和深度学习方面
卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM、XGBOOST、TCN实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
2.图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
3 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划、天线线性阵列分布优化、车间布局优化
4 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配
、无人机安全通信轨迹在线优化
5 无线传感器定位及布局方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化
6 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化
7 电力系统方面
微电网优化、无功优化、配电网重构、储能配置
8 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长 火灾扩散
9 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合、状态估计
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢