
在下棋,办公,游戏这类脑力活动中,人类被AI碾压已经早就不是什么新闻了。
现在连极限竞速领域,人类的阵地也失守了!
今天Nature的封面论文,内容是AI驾驶系统在无人机竞速领域击败了人类SOTA。

论文地址:https://www.nature.com/articles/s41586-023-06419-4
来自苏黎世大学和英特尔的研究团队开发的Swift系统,成功地在第一人称视角(FPV)无人机比赛中,击败了3位人类世界冠军,单圈速度比人类快了半秒!
AI无人机内心OS「遥遥领先!」
比赛当中,驾驶选手需要驾驶高速无人机完成一个三维空间内的立体赛道。人类驾驶员和AI都只能通过机载摄像头的拍摄的视频流来观察环境,操纵无人机的飞行。
2019年,当时成绩最好的Alphapilot系统,如果不依靠外部的追踪系统来精确控制无人机的飞行轨迹,完成比赛的时间几乎是人类的两倍。
Swift系统和人类选手一样,仅通过对机载摄像头收集的数据做出实时反应,让完成比赛的时间有了质的飞跃。
它的集成的惯性测量单元(inertial measurement unit)测量无人机的加速度和速度,神经网络通过来自摄像头的数据来定位无人机在空中的位置,并检测跑道上的需要通过的门。
这些信息被汇总到基于深度强化学习(DeepRL)的控制单元,做出最佳的反馈指令,从而尽可能快地完成赛道。

FPV无人机比赛中使用的是四轴飞行器,是市面上最为灵活的无人机。比赛中无人机受到的加速力,可能超过自身重力的5倍还多,飞行时速超过100公里每小时!

赛道由7个正方形的门组成,场地大小为30*30*7的三维空间,飞行距离超过75米。无人机必须按顺序通过每个门,连续跑完3圈,才能完成比赛。

人类驾驶员佩戴头显,来获得实时的视频信号。头显能提供身临其境的「第一人称视角」体验。
超越人类世界冠军选手的Swift系统,主要由两个关键模块组成:
1. 将高维度视觉和加速度信息转化为低维度表示的感知系统
2. 获取低维度表示并生成控制命令的控制AI系统
这个控制AI系统由前馈神经网络进行表征,使用无模型的On-Policy深度强化学习进行模拟训练,不断提高跑圈成绩。
研究人员通过使用从物理世界收集的数据估计的非参数经验噪声模型(non-parametric empircal noise medels),来缩小模拟与物理世界中的感知和动力学差异。
这些噪声模型能有效地将模拟中的控制策略转化为现实中的控制指令。
人类选手在赛道上进行了一周的练习,在完成了一周的训练后,每个飞行员都与Swift进行了多场正面1V1的比赛。

Swift的胜利标志着AI控制的自主操控系统首次在与人类的竞技比赛中获得了胜利。
Swift系统
Swift是一个端到端的自主控制系统,它能让无人机像人类选手一样参加FPV无人机赛事并取得具有竞争力的成绩。
它的系统中主要包含以下两个模块:
1. 感知系统
感知系统由一个VIO模块组成,该模块通过相机图像和惯性测量单元(IMU)获得的高频测量值计算无人机状态的度量估计值。
VIO和门检测结果经卡尔曼滤波整合为无人机状态。随后,控制策略网络将状态和之前动作作为输入,输出控制命令。
这个系统能将来自无人机上的摄像头和惯性传感器等复杂高维信息,转化成无人机当前状态的低维表示。
包括无人机在赛道上的位置、速度、姿态等,并使用了视觉惯性系统和神经网络进行图像处理和状态估计。
2. 控制策略
每个timestep中,策略网络会根据状态和之前动作输出。
Swift中的价值网络评估这个动作的价值,之后两个网络的参数会通过强化学习进行优化。
这个策略用一个简单的两层全连接神经网络表示,输入是感知系统输出的无人机当前状态,输出是给无人机的控制命令(推力和体积转速)。它通过在模拟环境中用强化学习的方式进行训练。
此外,为了把Swift的感知和行动跨域迁移到真实世界,研究人员使用了两个残差模型来处理动力学和感知上的偏差:
感知残差模型:使用高斯过程拟合真实飞行中惯性系统的误差,并在模拟中加入。
动力学残差模型:使用k近邻回归拟合真实飞行中动力学的误差,并在模拟中加入。
通过这种方式,Swift可以适应真实世界中的不确定性,实现从模拟到物理系统的有效迁移。
经过训练后,它可以像专业选手一样驾驶无人机进行FPV赛事,甚至在部分场景下超越了人类冠军的表现。
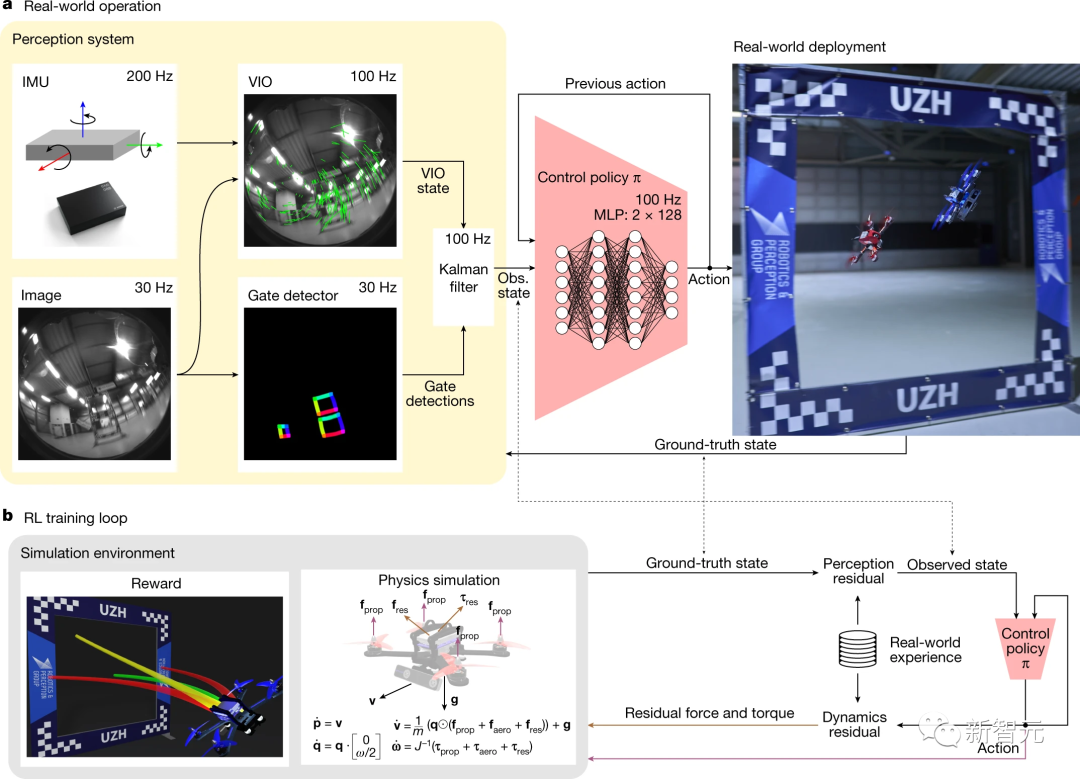 图a:Swift在实际使用中从传感器获取数据并生成控制命令的过程
图a:Swift在实际使用中从传感器获取数据并生成控制命令的过程图b:在仿真环境中使用强化学习训练控制策略的过程
结果
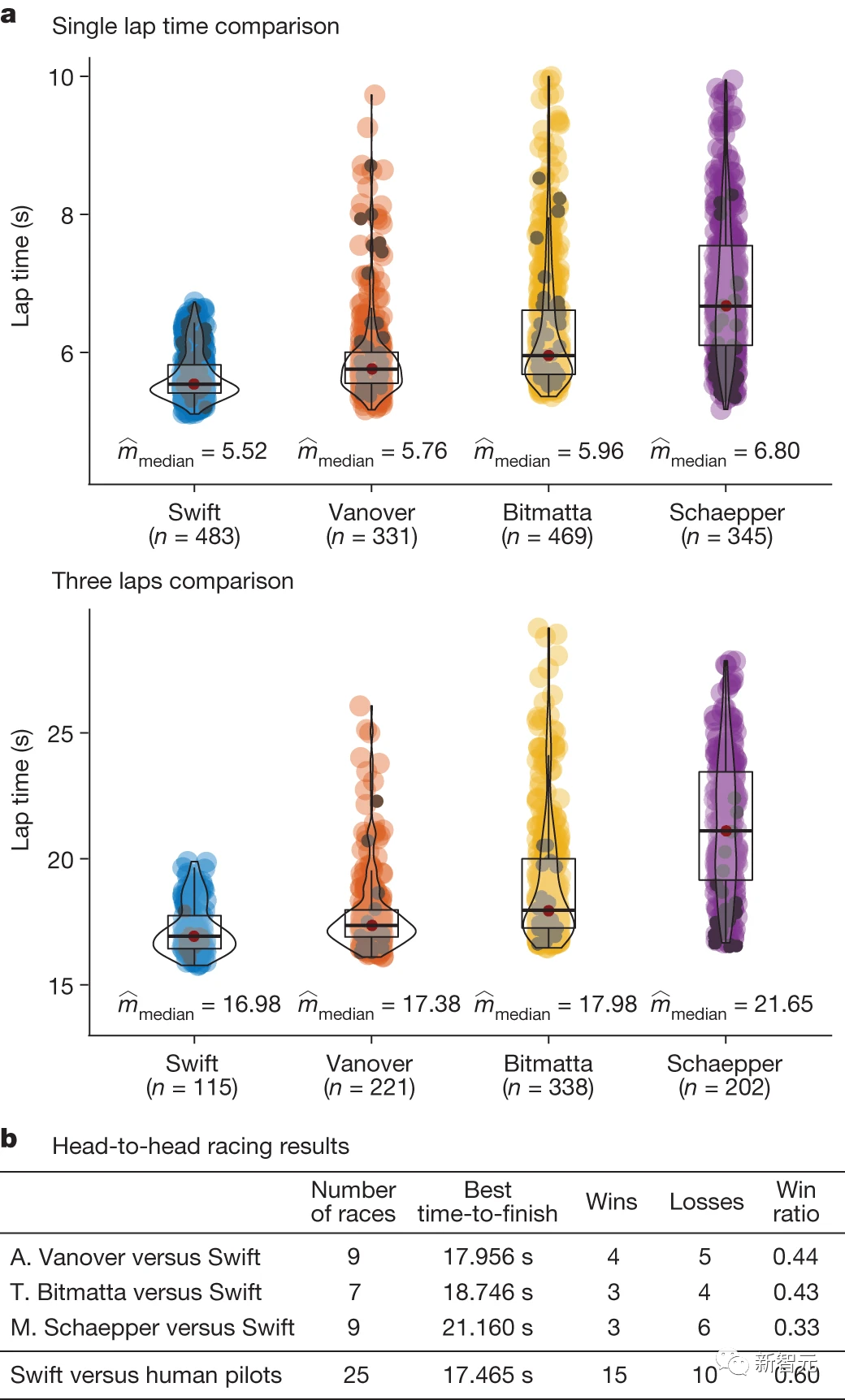
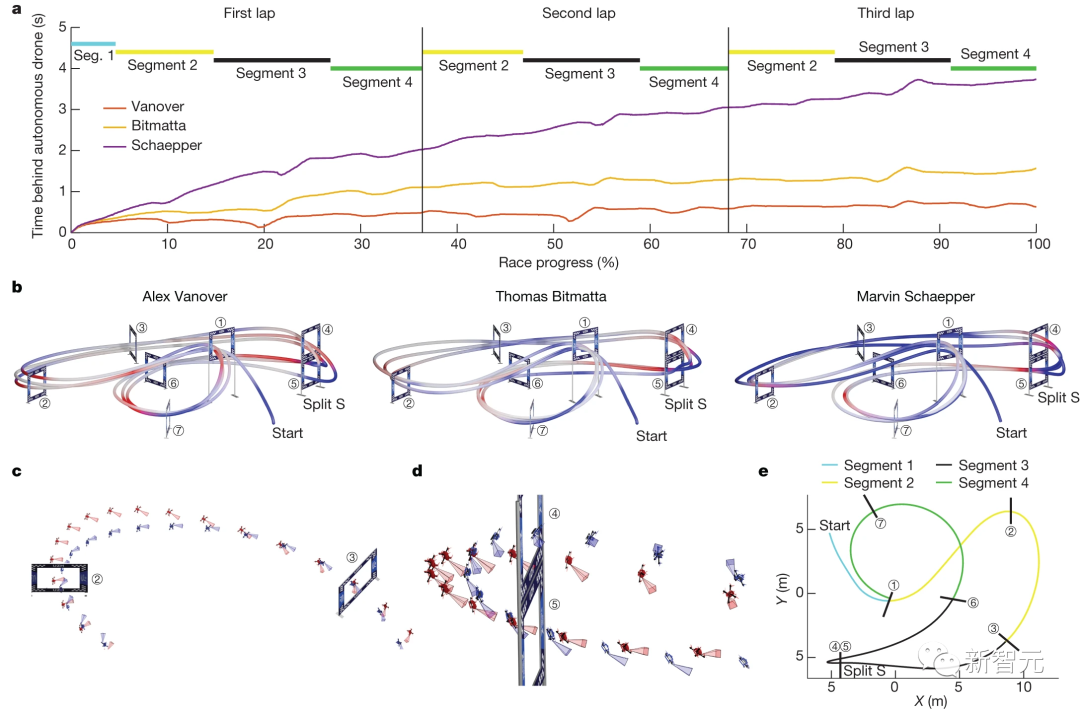
单圈时间表示连续三圈热火中达到的最佳单圈时间和最佳平均时间。如下图a所示,Swift不仅平均单圈时间更快,平均三圈时间也更稳定。
正面交锋的结果则如下图b所示,在与A.Vanover的9场比赛中,Swift赢了5场;在与T.Bitmatta的7场比赛中,Swift赢了4场;在与M.Schaepper的9场比赛中,Swift赢了6场。
研究人员解释,在Swift输掉的10场比赛中,40%是因为与对手发生碰撞,40%是因为与闸门发生碰撞,20%是因为无人机的速度比人类飞行员慢。
总的来说,Swift在与人类飞行员的比赛中获胜最多。Swift还取得了最快的比赛时间记录,比人类飞行员(A.Vanover)的最佳时间领先半秒。
研究人员分析了Swift和每个人类飞行员飞行的最快圈速。
从整体上看,Swift比所有人类飞行员都要快,但它在赛道的所有单个赛段上的速度并不快。
在起跑时,Swift的反应时间较短,平均比人类飞行员早120毫秒从领奖台起飞。并且它的加速更快,进入第一个闸门时的速度更高。
如下图c、d所示,在急转弯时,Swift的机动更紧凑。
研究人员推测,造成这一结果的原因是Swift在选择轨迹时的时间更长。
因为它可以根据价值函数来优化长期回报,而人类飞行员最多预测一个未来,所以规划的时间尺度更短。
在下图b,d中可以看到,人类飞行员在动作开始和结束时速度较快,但总体速度较慢。
同时,与人类相比,Swift在执行某些机动动作时也能依靠其他线索,例如惯性数据和针对周围环境特征的视觉里程测量。
这些都帮助了自主无人机在比赛中实现了最高的平均速度、最短的赛线,并在整个比赛过程中设法将飞机保持在更接近其驱动极限的状态。
讨论
研究人员开发的这个自主控制系统,能够在FPV无人机竞速中实现冠军级别的表现,甚至在某些情况下超越人类世界冠军。

方法
训练算法
训练是使用近端策略优化(Proximal Policy Optimization,PPO)方法进行的。这种actor-critic方法在训练期间需要同时优化两个神经网络:策略网络(将观测映射到动作)和值网络(作为「critic」评估策略采取的动作)。
观察、行动和奖励
训练细节
数据收集是通过同时模拟100个代理与环境进行交互,每个代理在1500个步骤的episode中与环境交互来完成的。
残差观测模型
高速移动会导致明显的运动模糊,这可能导致跟踪的视觉特征丢失和线性里程计估计的严重漂移。
无人机硬件配置
人类飞行员和Swift使用的四旋翼飞行器具有相同的重量、形状和推进力。但由人类驾驶的无人机既不携带Jetson计算机,也不携带RealSense摄像头,而是配备了相应的压舱物。
人类飞行员评价
与Swift比赛的三位人类冠军都谈了谈和无人机比赛的感受:
推荐阅读
西电IEEE Fellow团队出品!最新《Transformer视觉表征学习全面综述》 润了!大龄码农从北京到荷兰的躺平生活(文末有福利哟!) 如何做好科研?这份《科研阅读、写作与报告》PPT,手把手教你做科研 奖金675万!3位科学家,斩获“中国诺贝尔奖”! 又一名视觉大牛从大厂离开!阿里达摩院 XR 实验室负责人谭平离职 最新 2022「深度学习视觉注意力 」研究概述,包括50种注意力机制和方法! 【重磅】斯坦福李飞飞《注意力与Transformer》总结,84页ppt开放下载! 2021李宏毅老师最新40节机器学习课程!附课件+视频资料
欢迎大家加入DLer-计算机视觉技术交流群!
大家好,群里会第一时间发布计算机视觉方向的前沿论文解读和交流分享,主要方向有:图像分类、Transformer、目标检测、目标跟踪、点云与语义分割、GAN、超分辨率、人脸检测与识别、动作行为与时空运动、模型压缩和量化剪枝、迁移学习、人体姿态估计等内容。
进群请备注:研究方向+学校/公司+昵称(如图像分类+上交+小明)

👆 长按识别,邀请您进群!

内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢