
点击蓝字 关注我们
关注并星标
从此不迷路

公众号ID|计算机视觉研究院
学习群|扫码在主页获取加入方式
计算机视觉研究院专栏
Column of Computer Vision Institute
NEWS TODAY
计算机视觉研究院出品

01
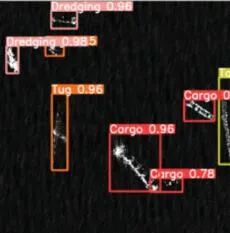
机场、船舶

在项目中,遇到一些小目标检测,尤其该目标是物体空间大小或纵横比、速度、遮挡、杂乱背景等变化,造成目标检测不到,误检、漏检等现象。通过研究,发现有些方法还是在一定基础上提升效果,满足实际场景需求。
为了解决所提出的一些挑战,同时最大限度地提高性能,我们利用当前最先进的YOLOv8,试图在推理速度和mAP之间找到最佳折衷。
NEWS
”

Column of Computer Vision Institute
基于YOLOv8模型的多尺度无人机图像目标检测算法,旨在克服与无人机图像目标检测相关的特定挑战。为了解决大场景大小和小检测对象的问题,我们对YOLOv8模型的颈部组件进行了改进。

现有的大多数方法依赖于具有不同尺度、角度和长宽比的启发式定义anchor,通常在anchor boxes和axis-aligned的卷积特征之间存在严重的不对准,这导致分类分数和定位精度之间存在的共同不一致。
旋转检测可以精确定位图像中的物体,并且边界框几乎不包含背景区域,从而减少背景对物体分类的影响。其次,旋转检测框之间几乎没有重叠,从而可以更清晰地识别框内包含的物体。最后,可以从旋转检测框粗略得到物体的运动方向信息,从而判断物体的运动轨迹。
NEWS
”
Column of Computer Vision Institute
CRAS-YOLO改进了基于路径聚合网络(PANet)的特征金字塔网络,该网络集成了RFB特征增强模块和ASFF特征融合策略,以获得更丰富的特征信息,并实现多尺度特征的自适应融合。同时,在骨干中增加了CBAM,以准确定位船只位置,提高检测能力。

02
智慧农业

针对采棉机械手棉花识别定位难的问题,提出一种基于机器视觉的棉花识别与定位方法,搭建出双目立体视觉系统,在此基础上通过相机标定、图像采集、图像处理、特征提取等过程,计算得出棉株的深度信息以及其成熟棉 花的三维信息。
NEWS
”
03
智慧建筑
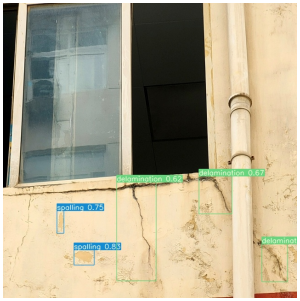
外观缺陷不仅影响了建筑的美观,也影响了其功能。此外,它们还可能危及行人、居住者和财产。我们基础到目前很多老破小社区建筑都有该现象,现在迫切需要AI实时监测,提高居民安全环境。
现有的基于深度学习的方法在识别速度和模型复杂性方面面临一些挑战。为了保证建筑外墙缺陷检测的准确性和速度,我们研究了了一种改进的YOLOv7方法BFD-YOLO。
NEWS
”

Column of Computer Vision Institute
由于缺乏夜间图像注释,夜间目标检测是一个具有挑战性的问题。尽管有几种领域自适应方法,但实现高精度结果仍然是一个问题。
在使用公认的师生框架的方法中,特别是对于小规模和低光物体,仍然可以观察到假阳性误差传播。我们提出了一种两阶段一致性无监督领域自适应网络2PCNet来解决这些问题。

04
智慧城市
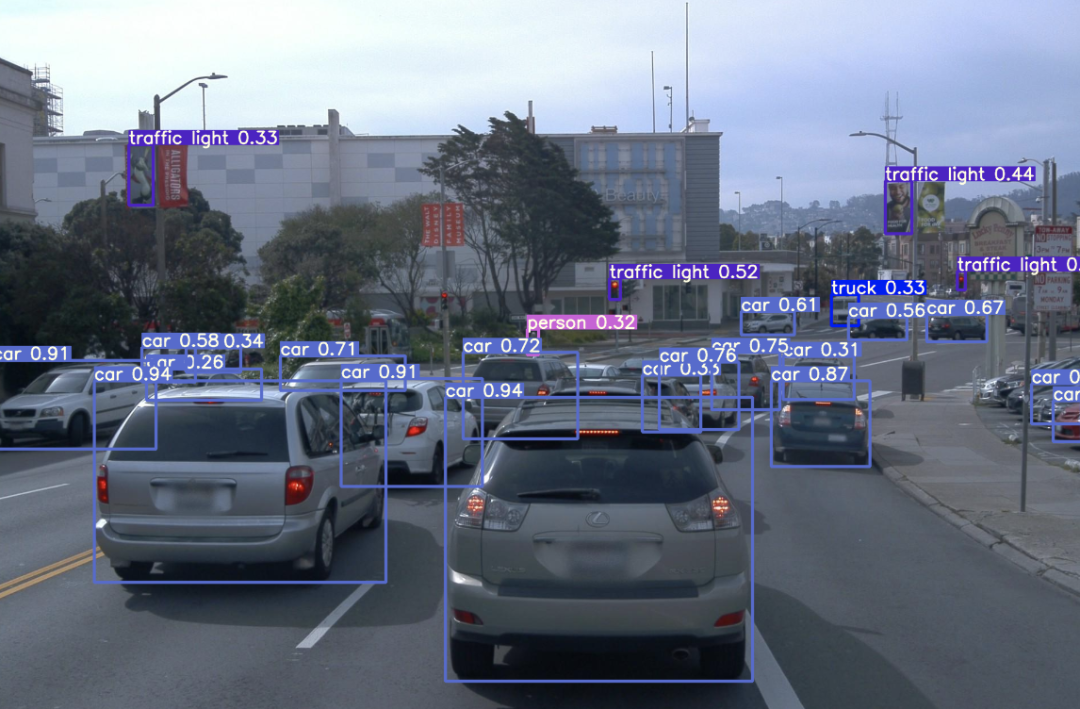
提出了YOLO-S,一个简单、快速、高效的网络。它利用了一个小的特征提取器,以及通过旁路和级联的跳过连接,以及一个重塑直通层来促进跨网络的特征重用,并将低级位置信息与更有意义的高级信息相结合。
NEWS
”
Column of Computer Vision Institute
SAM因其令人印象深刻的零样本传输性能和与其他模型兼容的高度通用性而备受关注,用于高级视觉应用,如具有细粒度控制的图像编辑。
许多这样的用例需要在资源受限的边缘设备上运行,比如移动应用程序。我们的目标是通过用轻量级图像编码器取代重量级图像编码器,使SAM对移动端友好。
NEWS TODAY
持续更新。。。
转载请联系本公众号获得授权

计算机视觉研究院学习群等你加入!
ABOUT
计算机视觉研究院

往期推荐
🔗
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢