波德开发了一种系统频率响应的渐近幅值和相位图形分析技术,后人称之为“波德图”(Bode plot),为工程师们研究线性定常系统的时域稳定性提供了一种直观快捷的频域图形分析方法。波德图是今天所有基础线性系统和控制理论教科书中必不可缺的内容。 亨德里克·韦德·波德(Hendrik Wade Bode,1905年12月24日-1982年6月21日)是一位荷兰裔美国应用数学家和系统工程科学家(图1)。
亨德里克·韦德·波德(Hendrik Wade Bode,1905年12月24日-1982年6月21日)是一位荷兰裔美国应用数学家和系统工程科学家(图1)。
波德于1905年12月24日出生在美国威斯康星州麦迪逊(Madison)的一个荷兰裔家庭。他的父亲博伊德(Boyd Henry Bode,1873–1953)出生于伊利诺伊州的里多特(Ridott)。博伊德于1900 年在康奈尔大学(Cornell University)获得博士学位。1903 年,博伊德与伯尼斯·巴拉德(Bernice Ballard,1873–1957)结婚。夫妇养育有两个孩子:亨德里克和妹妹埃莉诺(Eleanor Bode,1909–1974)。1900年起,博伊德在威斯康星大学麦迪逊分校任职哲学教授,后于1909年转到伊利诺伊大学厄巴纳–香槟分校(University of Illinois at Urbana-Champaign,UIUC),在那里任职哲学教授至1921年。波德的父亲到UIUC述职时把全家迁到了厄巴纳。1910年,波德入读莱尔学校(Leal School)。他在学校里表现非凡,1920年便从该校高中毕业。可是,当他申请UIUC时被校方拒绝,理由是不足15岁这年龄太小了。次年,适逢他父亲转到俄亥俄州立大学(Ohio State University)任教,波德进入了俄亥俄州立大学。1924年,19岁的波德完成了大学学业并获得数学学士学位。两年后,他在该校获得数学硕士学位,随后留校担任了一年的助教。1926年,波德接受了贝尔电话实验室(Bell Telephone Laboratories)的工作,来到纽约,开始了他的职业生涯。当年在贝尔实验室里,他的主要工作是为通信系统设计电子滤波器(filter)和均衡器(equalizer)。1929年,波德被分配到贝尔实验室的数学研究组。他擅长电子网络理论及其在通信领域的应用研究。后来,在贝尔实验室的资助下,波德注册了哥伦比亚大学(Columbia University)成为在职研究生。1935年,他完成了题为“电波滤波器的一般理论”(A general theory of electric wave filters)的博士论文,获得物理学博士学位。
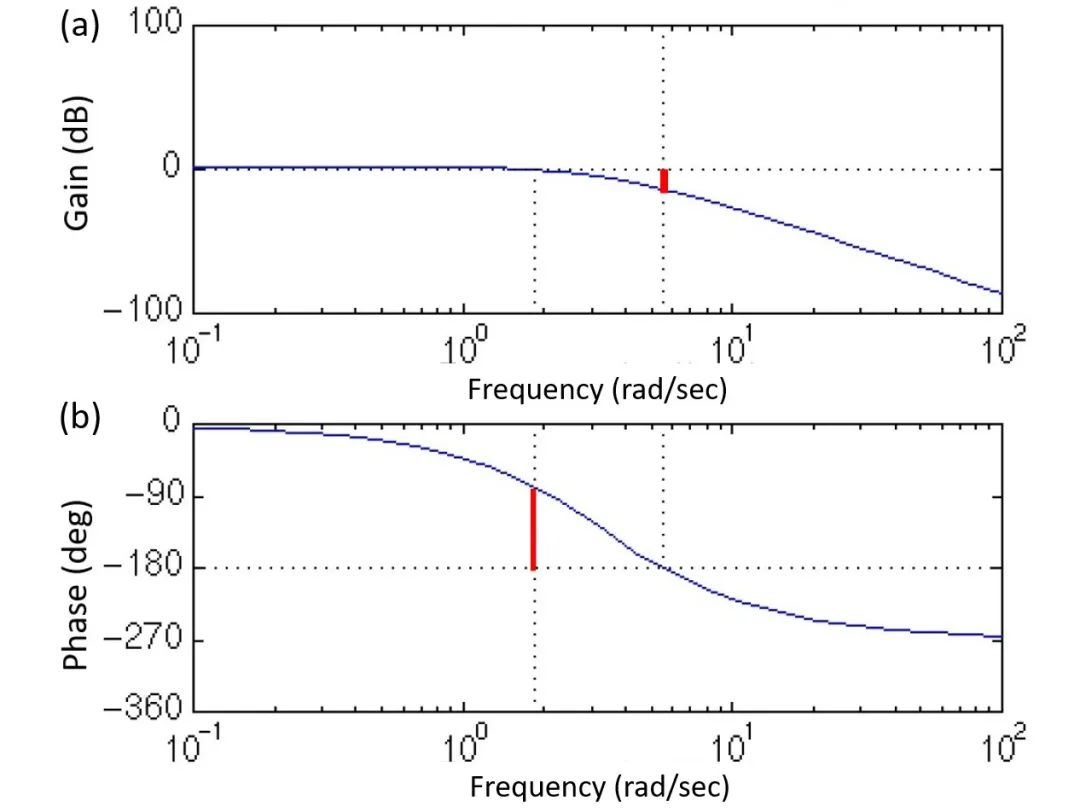
在贝尔实验室的工作中,波德在设计电话网络反馈放大器时遇到了整个系统的稳定性问题。当年,现代控制系统的状态空间理论还没诞生,系统稳定性分析是个棘手问题。1938–1940年间,波德开发了一种系统频率响应的渐近幅值和相位图形分析技术,后人称之为“波德图”(Bode plot),为工程师们研究线性定常系统的时域稳定性提供了一种直观快捷的频域图形分析方法。波德的频率响应分析方法总结在他的专著《网络分析和反馈放大器设计》(Network Analysis and Feedback Amplifier Design)中。该书最初以油印本形式发行,但因需求量大,最终于1945年印刷出版。之后,波德图技术迅速地被应用于许多工业操作系统特别是伺服机构和反馈控制系统的设计之中。波德图是今天所有基础线性系统和控制理论教科书中必不可缺的内容。它包含波德幅值图(Bode magnitude plot)和波德相位图(Bode phase plot)。简要地说,对于一个线性定常系统的传递函数H(s),其中s是频率复变量,它的波德幅值图是函数|H(s=jω)|的图形,其中ω是频率实变量,以每秒弧度(radian/second)为单位,而 。在幅值图中,频率ω作为横坐标以对数刻画,幅度|H|作为纵坐标按20log10|H|来绘制,以分贝(dB)为单位(图2(a))。波德相位图绘画出arg(H(s=jω))的曲线,其中横坐标与幅值图一样,但纵坐标为线性,以角度(degree)为单位(图2(b))。系统稳态输出与输入的信号幅值之比称为增益(gain)。波德图可以用来显示系统在运作期间电路特性发生变化情形下还能保持其稳定性所需的增益裕度(gain margin)和相位裕度(phase margin)。增益裕度是在相位等于-180°的频率下测量的。增益裕度表示从测量的增益到 0 dB 增益之间的距离,即增益必须减少多少分贝才能达到0 dB。用公式来表示,就是:增益裕度=0-增益,仍以分贝为单位(图2(a))。相位裕度是在增益等于 0 dB 的频率下测量的。相位裕度表示从测量的相位到-180°相移之间的距离,即相位必须减少多少度才能达到-180°。用公式来表示,就是:相位裕度=相位-(-180°),仍以角度为单位(图2(b))。系统的稳定性可以通过其开环传递函数的增益裕度和相位裕度两者一起来判断:裕度越大,系统稳定性越高。特别是,0 dB和-180°这两个数值是不能碰触的红线:如果曲线越过这两个数值,系统便是不稳定的。图2 波德图:(a) 幅值图和增益裕度;(b) 相位图和相位裕度和波德图相关的还有奈奎斯特(Harry Nyquist,1889–1976)图和尼科尔斯(Nathaniel B. Nichols,1914–1997)图。它们是参数图,以频率作为输入,以频率响应的幅度和相位作为输出,在此不细说。不过,值得提及的是,1934–1954年期间奈奎斯特也在贝尔实验室工作,他和波德一起建立了系统稳定性的频域图形分析方法。
。在幅值图中,频率ω作为横坐标以对数刻画,幅度|H|作为纵坐标按20log10|H|来绘制,以分贝(dB)为单位(图2(a))。波德相位图绘画出arg(H(s=jω))的曲线,其中横坐标与幅值图一样,但纵坐标为线性,以角度(degree)为单位(图2(b))。系统稳态输出与输入的信号幅值之比称为增益(gain)。波德图可以用来显示系统在运作期间电路特性发生变化情形下还能保持其稳定性所需的增益裕度(gain margin)和相位裕度(phase margin)。增益裕度是在相位等于-180°的频率下测量的。增益裕度表示从测量的增益到 0 dB 增益之间的距离,即增益必须减少多少分贝才能达到0 dB。用公式来表示,就是:增益裕度=0-增益,仍以分贝为单位(图2(a))。相位裕度是在增益等于 0 dB 的频率下测量的。相位裕度表示从测量的相位到-180°相移之间的距离,即相位必须减少多少度才能达到-180°。用公式来表示,就是:相位裕度=相位-(-180°),仍以角度为单位(图2(b))。系统的稳定性可以通过其开环传递函数的增益裕度和相位裕度两者一起来判断:裕度越大,系统稳定性越高。特别是,0 dB和-180°这两个数值是不能碰触的红线:如果曲线越过这两个数值,系统便是不稳定的。图2 波德图:(a) 幅值图和增益裕度;(b) 相位图和相位裕度和波德图相关的还有奈奎斯特(Harry Nyquist,1889–1976)图和尼科尔斯(Nathaniel B. Nichols,1914–1997)图。它们是参数图,以频率作为输入,以频率响应的幅度和相位作为输出,在此不细说。不过,值得提及的是,1934–1954年期间奈奎斯特也在贝尔实验室工作,他和波德一起建立了系统稳定性的频域图形分析方法。
第二次世界大战(1939–1945年)爆发后,波德将研究目光转向了控制系统的军事应用。这一研究方向持续到他职业生涯的结束。在贝尔实验室,波德得到国防研究委员会(National Defense Research Committee)项目的资助,开发防空用的自动火炮控制系统。在该系统中,雷达锁定目标后将侦测到敌机位置的数据通过无线传输送到连接火炮伺服机构的反馈控制系统的地面接收器,让伺服机构准确地修改其仰角和射程并确定最佳开火时间,自动地将敌机击落。敌机坐标的预测由名为 Director T-10的电子计算器来完成。它根据雷达提供的目标位置信息来计算目标平均速度,并根据假设的目标飞行路径方程去预测它的未来位置。当年使用的伺服机构有电力和液压两种动力,其控制方式不同但数学原理是一样的。波德主持设计的这个防空自动火炮控制系统实际上是现代反弹道导弹防御系统的早期版本。波德还利用统计分析方法对雷达信号作平滑处理以减小信号波动和外界噪声对测量数据的影响从而获得目标位置的精准估计。事实上,波德通过结合无线数字通信、电子计算器、统计分析方法和反馈控制原理实现了自动控制系统历史上第一个完整实用的反馈控制回路。他戏称这种多学科的联合为“被迫联姻”(shotgun marriage)。他说:“我认为,这是第二次世界大战中军事问题的压力强加给我们的一种[技术]‘联姻’。”他还将这种多学科联合工作的产物即自动火炮系统称为“被迫联姻的儿子”。从当年这个联合模型中人们已经可以看到后来出现的许多概念和术语,诸如数据处理、自动化、控制论、人工智能、机器人技术,等等。后来,波德还改进了 Director T-10 模型的目标数据平滑方法和位置预测器设计,将之提升为Director T-15模型。这一工作是在国防研究委员会给贝尔实验室的一个名为Fundamental Director Studies的新项目资助下完成的。开始时,新项目的研究在通过对目标位置移动求微分来计算目标速度时遇到了麻烦。由于观测到的雷达信号变化的不连续性以及测量噪声都会为数值微分结果带来极大波动,它们导致火炮的伺服机构运动不稳定。虽然这个问题可以通过数据平滑和滤波技术来缓解,但这会导致反馈回路动作延迟,从而使目标获得足够时间逃脱。此外,Director T-10 的算法需要从笛卡尔坐标到极坐标再回到笛卡尔坐标的转换,引入额外的计算时间和执行误差。波德为Director T-15设计了应用计算网络有限差分法代替微分法的速度估算公式。在该程序里,目标位置的坐标被记录在一个机械存储器中。然后,通过计算目标当前位置的坐标与存储器中储存的坐标之间的差值,再除以它们的时间差,便能估算到目标的速度。今天知道,这其实就是计算数学里的后向差分算法。此外,Director T-15 仅需在笛卡尔坐标系中运行,消除了由于坐标变换带来的额外计算和时延增加问题。Director T-15 把Director T-10 的计算精确度及收敛速度都提高了两倍。波德主导开发的自动火炮控制系统在第二次世界大战期间多次被成功使用。1944年2月,基于Director T-10(军方称为Director M-9)的自动火炮控制系统首次在美国投入使用。后来在意大利Anzio的空战中,它协助空军击落了一百多架敌机。在诺曼底登陆日(D Day)美军部署了39个自动火炮控制系统以保护盟军抵御德国空军的攻击。1944 年 6 月,纳粹德国火箭工程师冯·布劳恩(Wernher von Braun,1912–1977 )宣称他们生产了新型的自动制导V-1飞行炸弹。当年,该自动制导飞行炸弹被广泛认为是一种难以抵御的巡航导弹。那时德国人在技术上确实有一种新技巧,可以让炸弹飞得又快又低,足以躲开普通雷达的侦测。这种先进技术至今仍被广泛采用。但是,美国人通过计算后确认,V-1飞行炸弹依然落在 Director T-10 自动火炮控制系统的掌管之中。为了应对德国纳粹可怕的“伦敦闪电战”(The Blitz),应英国首相丘吉尔的特别要求,美军在伦敦南部的周边地区部署了一百辆 Director T-10 辅助的90毫米自动火炮装置。这个防空系统包括由麻省理工学院辐射实验室(Radiation Lab)设计的 SCR-584 雷达以及由国防研究委员会资助开发的邻近保险丝机制(proximity fuse mechanism),使用一个在对方目标附近引爆的微波受控引信(也称为可变时间引信),让自动火炮控制系统能够实施更大范围的爆炸从而增加成功摧毁飞行目标的机会。1944 年 6 月 18 日至 7 月 17 日期间,英美联军使用这种自动火炮控制系统一共击落了 343 枚 V-1 飞行炸弹,约占德军发射的 V-1 飞行炸弹总数的 10%和盟军击落总数的 20%;从 7 月 17 日到 8 月 31 日,击落的数量上升至德国发射的 V-1 飞行炸弹总数的 34%,其中约一半是在伦敦上空击落的。盟军的战绩证明了该自动火炮控制系统的强大威力,其中波德功不可没。1948年,美国总统杜鲁门授予波德“总统优异奖”(President’s Certificate of Merit),表彰他对国家和反法西斯战争作出的杰出科学贡献。波德关于Director T-10和T-15的研究项目最终还导致了其它一些相关领域的重要发展,并为后来的许多发明创造奠定了基础。例如,在控制理论方面,它有助于伺服机构设计和自动化系统的进一步提升;在数值计算方法方面,它达到了当年数值微分的最先进水平并影响了电子模拟计算机的研制;在无线数据通信理论方面,它推动了后来无线通信网络的开发。
1945年,随着第二次世界大战的结束,美国国防研究委员会公开发布了一份由贝尔实验室科学家布莱克曼(Ralph B. Blackman,1904–1990),波德和香农(Claude E. Shannon,1916–2001)合写的关于自动火炮控制系统中数据平滑和预测的技术报告。该报告的公布表明了保密研究课题军事用途的结束,也预示了以数据建模、信号处理及数字通信为核心的信息时代的开始。1950年,波德和香农合著出版了一本技术专著《线性最小二乘平滑和预测理论》(Linear Least Square Smoothing and Prediction Theory,图3)。1952年,波德在贝尔实验室被提升为数学研究室主任。1955年,他成为贝尔实验室物理科学研究所所长,在那里他一直工作到1958年。之后,他成为了贝尔实验室负责军事发展和系统工程的两位副总裁之一并担任该职直至退休。期间,他还兼任过参与美国宇航阿波罗计划的贝尔康姆公司(Bellcomm Inc)的技术部门主任。1967年,在贝尔实验室工作了41年的62岁波德从贝尔电话实验室退休。这时,波德已经在《贝尔实验室技术杂志》(Bell Labs Technical Journal)上发表了许多技术性论文并在电气和通信工程领域拥有 25 项专利。这些论文和专利的技术内容主要在传输网络、变压器系统、电波放大器、宽带信号放大器和自动炮火控制系统方面。波德随即应哈佛大学邀请出任系统工程学Gordon McKay讲座教授。任职期间,他开展基于随机过程的军事决策和各种优化技术研究。在哈佛,波德为工程与应用物理系的本科生上课并亲自指导研究生。此外,他还研究了科学技术对现代社会的影响,并在哈佛大学的科学与公共政策研讨会上讲授有关这个主题的课程。1971年,波德整理出版了《协同:贝尔系统的技术整合与技术创新》(Synergy: Technical Integration and Technological Innovation in the Bell System)一书。他使用外行人也能理解的论述方式和语言,分析并推广了贝尔实验室多年实践的系统工程技术及其哲学经验。他解释了貌似不同的若干工程领域如何在“系统”的框架下通过信息交流而相互融合,从而向大庭广众介绍了贝尔实验室这样的机构内部技术合作的模式。1974年,69岁的波德第二次退休。哈佛大学授予他荣休教授的称号,并让他继续留在哈佛大学的办公室工作。此后,波德依然积极参与政府的一些委员会活动并为政府机构提供政策性问题的咨询。波德毕生在业余时间广泛阅读。他亦很喜欢划船和园艺,并经常参与公益活动。他的妻子芭芭拉(Barbara Poore Bode,1908–1999)也经常到图书馆和公共部门做义工。他俩1933年结婚,养育有两个女儿:凯瑟琳·安妮(Katherine Anne)和比阿特丽斯·安妮(Beatrice Anne)。1982年6月21日,波德在麻省剑桥家中去世,享年77岁(图4)。
1960年,他获得美国能源部颁发的劳伦斯奖(Lawrence Award)。劳伦斯是1939年诺贝尔物理学奖获得者。1964年,他成为美国国家工程院的25个建院院士之一。1967–1971年间,波德作为美国国家科学院的理事会成员担任了科学院工程部在科学与公共政策委员会的代表。他对委员会三项重要研究项目都做出了重要贡献:基础研究和国家目标(1965),应用科学技术发展(1967),技术评估和选择(1969)。这些研究成果是科学院首次为美国众议院的科学及航天技术委员会提供的决策咨询。在“基础研究和国家目标”建议书中,波德写道:“基础研究的增加本身不一定会导致……有益应用的显着增加。其结果主要取决于整体结构。因此,这个国家面临的首要任务是维持一个以连贯而有效的方式去运作的科学技术机构。”1969年,波德荣获电气与电子工程师协会(IEEE)颁发的爱迪生奖章(Edison Medal,1909年开始颁发),表彰他“对通信、计算和控制技术的奠基性贡献、将数学科学应用于工程问题的引领,以及对系统工程的指导性和创造性的建议”。1975 年,波德和奈奎斯特分享了美国机械工程师协会(ASME)颁发的奥尔登堡奖章(Oldenburger Medal),表彰他们“在推进自动控制科学和技术方面取得的成就,特别是他们开发的广泛应用于反馈控制系统设计的频域技术”。1977年,波德获伊利诺伊大学(UIUC)授予荣誉哲学博士学位。1979年,波德成为美国自动控制委员会颁发的贝尔曼控制遗产奖(Bellman Control Heritage Award)的第一位获奖人。该奖项颁发给“对自动控制理论或应用做出终生杰出贡献的研究人员”,是“对美国控制系统工程师和科学家最高终生成就的认可”。此外,波德还是IEEE、APS、SIAM等学会的会士或高级会员。1989年起,IEEE 控制系统学会(Control Systems Society,CSS)颁发“波德演讲奖”(Bode Lecture Prize),表彰对控制系统科学或工程作出杰出贡献的个人。2019年,中国科学院郭雷院士成为历史上获此殊荣的首位华人科学家。他在IEEE控制与决策年会上领奖并作了题为“反馈与不确定性:基本问题和定理”的演讲(图5)。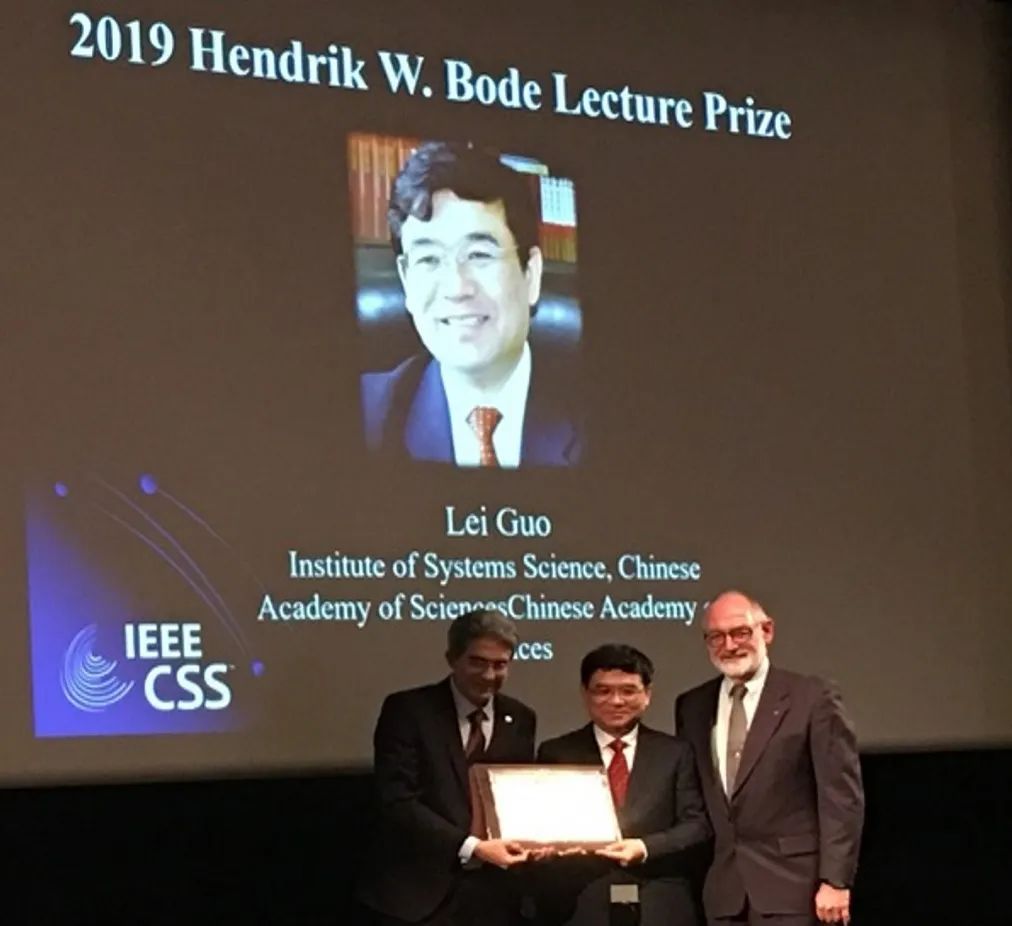
图5 郭雷院士荣获IEEE 控制系统学会颁发2019年“波德演讲奖”本文发表在《系统与控制纵横》2023年第2期5-11页,获作者授权转载。
对复杂动态系统的定量认识与科学调控,系统学与控制论是关键基础。为了帮助各位跨领域学习者,能学习到控制论的核心思考框架和核心方法,由郭雷院士领衔,多位控制科学与工程领域专家参与,将于2024年春在集智学园开设《控制科学前沿理论与方法系列课程》。欢迎感兴趣的朋友报名参与!
内容中包含的图片若涉及版权问题,请及时与我们联系删除




评论
沙发等你来抢