

请感兴趣的伙伴们点击阅读原文报名!
一、嘉宾介绍
江佳齐博士,于 2016 年和 2019 年在北京理工大学宇航学院分别获得学士与硕士学位,博士期间在罗山教授的指导下对视触觉领域进行了深入的研究,并于 2024 年获得英国伦敦大学国王学院的博士学位。
其研究领域主要集中在四旋翼无人机控制,可旋转触觉传感器的设计与开发,以及透明物体的感知与抓取技术。在博士期间,江博士参与了英国国家科研与创新署项目,近五年发表期刊和会议论文 14 篇,相关成果得到国内外同行的认可。他曾获 2022 年 IEEE CASE 国际会议最佳学生论文提名奖 (5/385) 及 2024 年 UK Manipulation Workshop 最佳海报奖 (1/63)。
二、报告简介
 图 1 新型视触觉传感器 TouchRoller (左)和 RoTip (右)
图 1 新型视触觉传感器 TouchRoller (左)和 RoTip (右)
江佳齐博士在其博士期间还对透明物体的感知和操作问题进行了相关研究,并发表了相关综述与研究论文。透明物体因其独特的视觉特性(如折射、反射和透光)使得商业深度相机难以精准捕捉其形态,导致视觉感知不准确。受到人类手眼协作行为的启发(例如,用眼睛定位物体的大致方向后,利用手触进一步接触定位),研究尝试结合视觉与触觉技术,以有效解决透明物体定位不准的问题并提高抓取成功率。
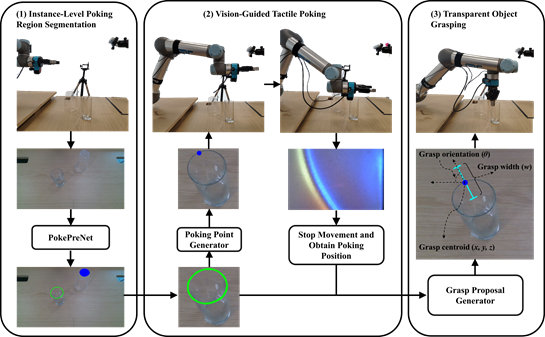
图 2 透明物体的视触觉感知与操作
江佳齐博士个人主页:
具身触觉社区将不定期举办触觉与机器人等相关领域的学术技术讲座与交流活动,敬请您的关注。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢