
论文名称:Multi-expert learning of adaptive legged locomotion
作者:Chuanyu Yang, Kai Yuan, Qiuguo Zhu, Wanming Yu, Zhibin Li
提交日期:2020.12.10
论文链接:https://arxiv.org/abs/2012.05810
推荐理由:
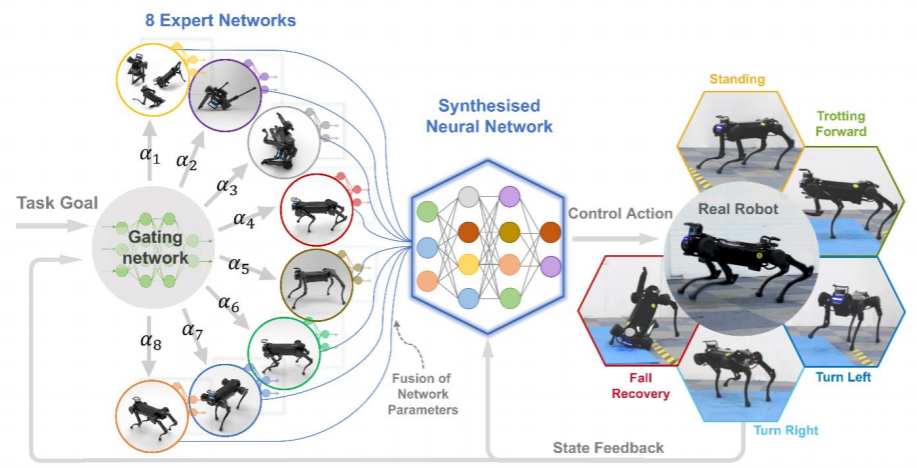
本文针对四足机器狗,如何通过有限的技能学习应对新型环境下的多技能推理问题,提出了一种学习架构。要实现多功能的机器人运动,就需要能够适应以前未见过的情况的运动技能。作者提出了一种多专家学习体系结构(MELA),该体系结构可以学习从一组具有代表性的专家技能中产生适应性技能。在培训期间,MELA首先由一组不同的经过培训的专家初始化,每个专家都在单独的深度神经网络(DNN)中。然后,通过使用门控神经网络(GNN)学习这些DNN的组合,MELA可以在各种运动模式下获得更多的专业专家和过渡技能。在运行时,MELA不断混合多个DNN,并动态合成新的DNN以响应不断变化的情况而产生自适应行为。这种方法利用了训练有素的专家技能的优势以及自适应策略的快速在线综合优势,可以在不断变化的任务中产生响应性的运动技能。使用统一的MELA框架,在真实的四足机器人上演示了成功的多技能运动,该四足机器人自动执行了连贯的小跑,转向和跌倒恢复,并展示了多专家学习生成行为的优点,该行为可以适应新环境的情况。
 特别是对于需要立即响应的关键任务。 作为学习复杂的身体任务的一个示例,踢足球包括运球、传球和投篮等子技能。 在训练期间,玩家首先要分别练习最重要的子技能。 一旦掌握,所有不同的子技能都可以灵活组合使用,以改进任务执行能力。
特别是对于需要立即响应的关键任务。 作为学习复杂的身体任务的一个示例,踢足球包括运球、传球和投篮等子技能。 在训练期间,玩家首先要分别练习最重要的子技能。 一旦掌握,所有不同的子技能都可以灵活组合使用,以改进任务执行能力。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢