
henry 发自 凹非寺
量子位 | 公众号 QbitAI
ImageNet的作者之一——苏昊被曝要去复旦任教了。

这位在具身智能领域论文被引次数最高的华人学者,不仅是ImageNet的缔造者之一,还主导了ShapeNet、PointNet、PartNet、SAPIEN、ManiSkill等一众奠基级项目。
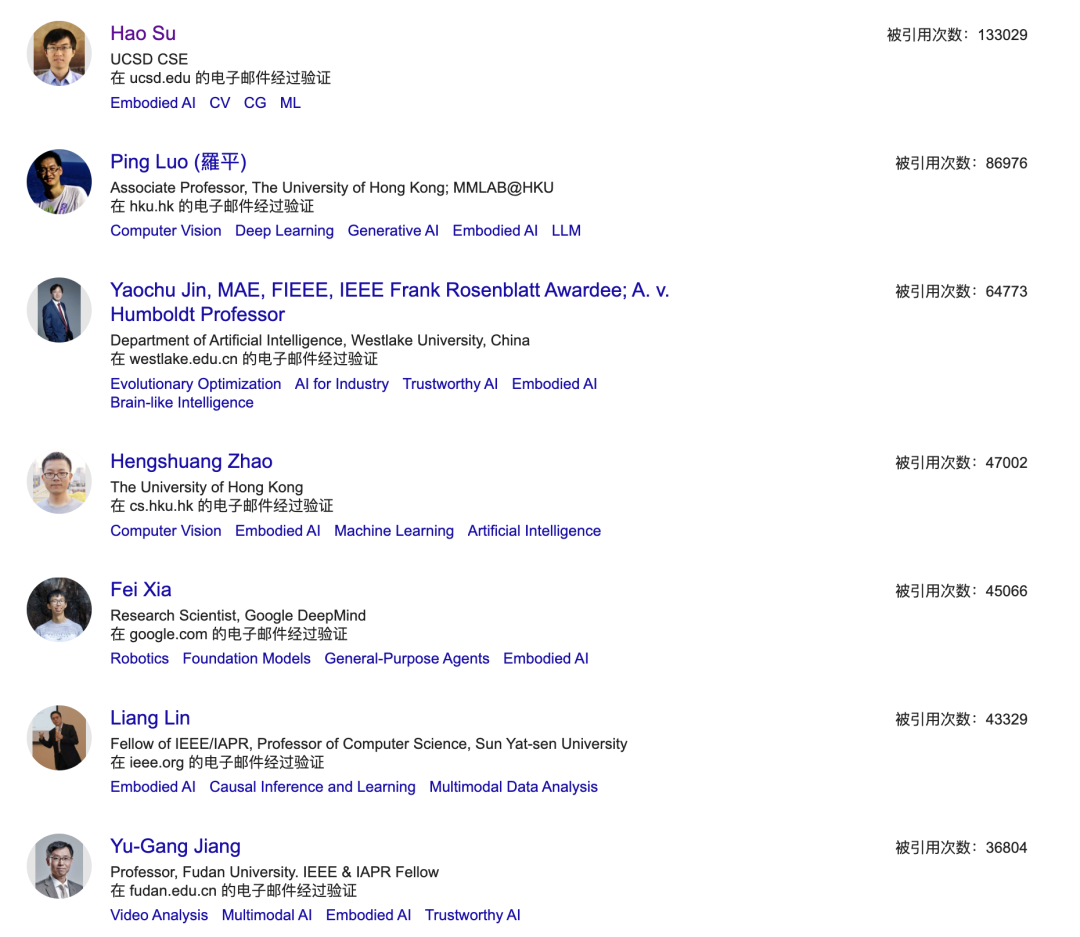
苏昊目前为加州大学圣地亚哥分校的副教授,在今年CVPR上,他还和谢赛宁共同分享了CVPR青年学者奖,以表彰他们在计算机视觉领域的杰出贡献。
值得一提的是,他还是弋力(清华叉院助理教授)、卢策吾(穹彻智能创始人,上交教授)、王鹤(银河通用创始人、北大助理教授)、严梦媛(OpenAI研究员)、莫凯淳(英伟达研究员)、祁芮中台(Waymo研究院)等一众大牛的师哥。
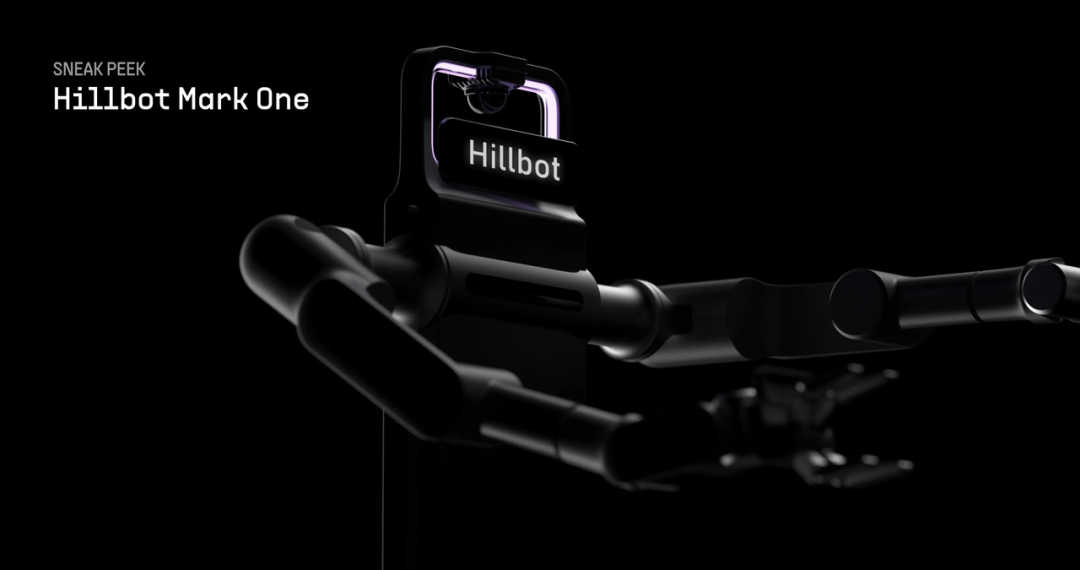
学术之外,去年他创办了主打仿真与3D生成的具身智能公司——Hillbot,并担任首席技术官。
目前,苏昊的简介暂未更新。

由于体育圈前脚刚上演詹姆斯“决定2”转会乌龙。
所以,咱们也先别急,不妨先来看看这位被传转会复旦的狠人究竟是何许人也。
苏昊是谁?
苏昊,加州大学圣地亚哥分校计算机科学学院副教授,具身智能实验室主任,专注于计算机视觉、图形学、具身智能与机器人领域,具身智能公司Hillbot联合创始人。
2002年,苏昊进入北航攻读计算机科学本科,并成为北京航空航天大学高等工程学院(现北航高等理工学院)的第一届学员。
本科期间,他师从原北航校长、中国科学院院士李未教授,研究方向涉及数理逻辑与定理自动证明等领域。
2005年,正值机器学习在中国学界初露锋芒,经李未教授推荐,苏昊前往微软亚洲研究院(MSRA)实习,师从孙剑、沈向洋、周明。
这一时期,苏昊主要关注语言与常识之间的关系,即自然语言处理。
然而,随着研究的深入,他逐渐意识到,相较于抽象化的语言,直接来自物理世界的信号(如视觉)才是理解智能更为根本的途径。
由此,他的研究重心逐步从自然语言处理转向计算机视觉,并在之后的博士阶段深入探索2D与3D视觉方向的研究。
不过,彼时正值计算机视觉乃至人工智能爆发的前夜,人们普遍认为计算机视觉的实现需要200年!
然而,事后看来,这一突破仅用了十余年,其中关键推动力正是李飞飞创建的ImageNet数据集。
无巧不成书,苏昊在沈向洋的推荐下,于2008至2009年先后在普林斯顿和斯坦福参与了ImageNet的相关研究工作。
(注:苏昊于2009年跟着李飞飞由普林斯顿转入斯坦福)
在ImageNet之后,苏昊与李佳合作了Object Bank,进一步提升了图像在高层视觉任务中的语义表示能力,使得简单分类器也能在物体识别和场景分类等任务上取得优异性能,这篇研究发表于2010年的NIPS上。
当2D视觉的方法论日趋完善后,苏昊将目光转向了3D视觉。
2014年,在获得北航的数学博士学位后,苏昊在Leonidas Guibas指导下在斯坦福攻读计算机博士学位,主攻3D视觉。
2015年,苏昊发布ShapeNet,这是一个大规模、注释丰富的3D物体模型库,包括超过300万个3D CAD模型,覆盖3135个类别。
这是全球第一个大规模3D数据集,被外界认为是3D领域的ImageNet。

在ShapeNet发布后,3D视觉的研究进入黄金发展期。
2017年PointNet与PointNet++的发布更是让3D视觉论文占比从小于10%升至70%。
其中,PointNet是首个直接处理原始点云数据的深度学习模型,而PointNet++则是对PointNet的扩展,旨在捕捉点云数据中的局部结构信息。

在2018年获得斯坦福计算机科学博士学位后,苏昊又发布了3D物体数据集PartNet。

可以说,苏昊对人工智能的思考历程,从语言到2D视觉,再到3D,是一个不断从抽象走向具体、逐步具象化的过程。
但正如苏昊在一次访谈中提到的:
可不可以有一个反向的过程,将具体的算法整合到一个更大的系统中?
基于这一思考,苏昊的学术重心又从计算机视觉迁移到机器人研究中。
2020年,苏昊在PartNet基础上发布了全球第一个以可泛化操作为核心的模拟器——SAPIEN,旨在推动机器人视觉与交互任务的研究。
(注:一个fun fact——SAPIEN的命名源于《人类简史》中的智人。)
2021年, 苏昊又基于SAPIEN发布了ManiSkill机器人操作仿真平台,用于测试和训练机器人操作技能。
同年ICCV,苏昊发起workshop,聚焦基于物理的建模与仿真、基于学习的仿真、人体仿真到具身视觉和机器人学习等广泛主题。

近年来,苏昊及其团队一直聚焦于仿真建模、3D生成、机器人通用操控等方向的研究。
对于为何要专注于模拟器和3D生成,苏昊表示:
在机器人领域,模拟器的价值远高于自动驾驶。因为在自动驾驶中,特斯拉等公司可以通过辅助驾驶持续收集大量数据,而机器人领域尚缺乏低成本的数据采集方式,因此高保真模拟器显得尤为关键。更进一步,为了实现更好的泛化能力,模拟器内容的丰富性至关重要。随着3D资产生成成本的降低,基于模拟与三维生成的方法有望取得更为显著的进展
这一思考,也体现在了苏昊创办的具身智能公司Hillbot上。
2024年,苏昊加入了具身智能的创业浪潮,创办了Hillbot,并担任首席技术官。
(注:Hillbot的另一位联合创始人兼CEO是知名创业者韩铮)
Hillbot旗下拥有Sapien仿真器以及ManiSkill机器人仿真训练平台,主打模拟和3D生成。
在产品方面,Hillbot推出了轮式机器人Hillbot Alpha,基于仿真训练,主要用于复杂环境下的移动操纵任务,如零售店、咖啡馆和制造车间等。

在技术合作方面,Hillbot与英伟达携手,借助Nvidia Cosmos平台快速生成高仿真、多样化的视频训练数据。
目前,Hillbot获得了来自Cherubic Ventures的投资。
具身智能新高地在复旦?
苏昊于2017年7月以助理教授身份入职加州大学圣地亚哥分校(UCSD)计算机科学与工程系,于2023年晋升为副教授,至今不过短短两年。
在UCSD,他领导着具身智能实验室,并在哈里乔奥卢数据科学研究所(HDSI)、视觉计算中心(CVC)和情境机器人研究所(CRI)担任职务。
去年,有传闻称苏昊在创办Hillbot期间曾短暂离开UCSD。
而今年,又有消息称他将赴复旦任职。
据网友爆料,复旦大学将投资Hillbot,并且苏昊也很可能会成为相辉研究院、学敏高等研究院的双聘对象。
然而,根据天眼查的数据,Hillbot目前尚无任何国内融资记录。

此外,今年1月,复旦成立了可信具身智能研究院,基本薪资为60万到100万,绩效上不不封顶。
目前,该研究院也只是公布了姜育刚副校长是领导,而非“院长”,所以是在给未来的大牛留空吗?

参考链接
[1]https://x.com/haosu_twitr
[2]https://openreview.net/profile?id=~Hao_Su1
[3]https://scholar.google.com/citations?user=1P8Zu04AAAAJ&hl=zh-CN
[4]https://cseweb.ucsd.edu/~haosu/bio.html
一键三连「点赞」「转发」「小心心」
欢迎在评论区留下你的想法!
— 完 —
🏆 年度科技风向标「2025人工智能年度榜单」评选报名开启啦!我们正在寻找AI+时代领航者 点击了解详情
❤️🔥 企业、产品、人物3大维度,共设立了5类奖项,欢迎企业报名参与 👇

一键关注 👇 点亮星标
内容中包含的图片若涉及版权问题,请及时与我们联系删除


评论
沙发等你来抢