
报告主题:给机器人装「透明手指」TacThru:指尖视角下的同步视-触觉感知
报告日期:01月21日(周三)14:30-15:30
本期报告将北京大学人工智能研究院李宇飏进行分享。
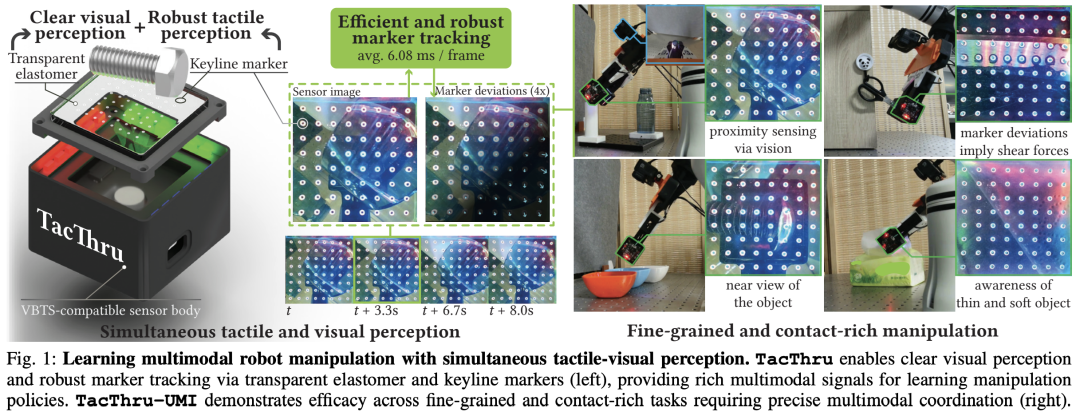
机器人在复杂真实环境中的操作常常面临感知不足的挑战:视觉容易因遮挡而失效,触觉只能在接触发生后提供局部信息;在视觉受限而触觉未被激活的“最后一厘米”关键阶段,环境感知能力的空白使机器人在精细和接触丰富的任务中表现受限。为解决这一问题,我们设计了 TacThru——一种全新的透视皮肤(STS)传感器。TacThru 通过几项简洁而高效的设计,使机器人能同步获取指尖视角下高质量的视觉与触觉信号,无需额外控制逻辑在两种模态间切换。同时,该设计保持与常见视触觉传感器本体的兼容性,仅需替换硅胶形变体即可应用。在此基础上,我们进一步构建 TacThru-UMI 模仿学习框架,融合多模态信号以实现操作控制。实验在五类真实任务中验证了该方法相较视觉、触觉模态的显著优势,尤其在处理薄软物体和精细对齐场景中展现出优秀性能。
Simultaneous Tactile-Visual Perception for Learning Multimodal Robot Manipulation

扫码报名
更多热门报告


内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢