

导语
“集智百科精选”是一个长期专栏,持续为大家推送复杂性科学相关的基本概念和资源信息。作为集智俱乐部的开源科学项目,集智百科希望打造复杂性科学领域最全面的百科全书,欢迎对复杂性科学感兴趣、热爱知识整理和分享的朋友加入,文末可以扫码报名加入百科志愿者!

↑↑↑扫码直达百科词条

何瑞杰、夏沛雯 | 作者
张江、王志鹏 | 整理&审校
作者简介


目录
1. 历史
2. 主要内容
2.1几何思维与相图表示
2.2不动点及其稳定性
2.2.1不动点的定义
2.2.2图形化稳定性判据
2.2.3线性稳定性分析(定量方法)
2.2.4势函数
2.3解的性质
2.3.1单调性与振荡的不可能性
2.3.2存在性与唯一性
2.4数值积分方法
3. 典型实例
3.1种群增长模型(逻辑斯谛方程)
3.1.1模型背景与动力学意义
3.1.2连续时间模型
3.1.3离散模型与应用拓展
3.2RC电路分析
3.2.1模型定义
3.2.2推导过程
3.2.3模型的解
3.2.4相图视角
3.3企业生长模型
3.3.1数学形式
3.3.2解的形式
3.3.3不动点分析
3.3.4奇异点分析
3.3.4.1稳定性
3.3.4.2经济含义
一维动力学典型的研究对象是一阶自治微分方程 ,及其解的长期行为。在一维情况下,系统的相图(phase diagram)称为相线(phase line),它可由函数 f(x) 在实轴上的符号结构与方向场来刻画,横坐标为 x ,纵坐标为直线上 x 处相点的速度,即
,及其解的长期行为。在一维情况下,系统的相图(phase diagram)称为相线(phase line),它可由函数 f(x) 在实轴上的符号结构与方向场来刻画,横坐标为 x ,纵坐标为直线上 x 处相点的速度,即 。鉴于此,我们可以将系统视为在一条直线(相空间)上流动的流体,函数定义了该流体的速度场(向量场)。通过该速度场我们可以立即看出系统的稳定和不稳定的不动点,并立即判定处在任意位置为初始状态的解的行为。此外,线性稳定性分析和系统的势函数也可以用来分析系统的不动点,要得到并计算系统的演化轨道,可以使用不同类型的数值积分方法求解系统的演化微分方程。该系统虽然简单,但其连续或离散的形式在各领域中均有广泛应用,如企业增长模型、Logistic 映射、RC 电路等等。
。鉴于此,我们可以将系统视为在一条直线(相空间)上流动的流体,函数定义了该流体的速度场(向量场)。通过该速度场我们可以立即看出系统的稳定和不稳定的不动点,并立即判定处在任意位置为初始状态的解的行为。此外,线性稳定性分析和系统的势函数也可以用来分析系统的不动点,要得到并计算系统的演化轨道,可以使用不同类型的数值积分方法求解系统的演化微分方程。该系统虽然简单,但其连续或离散的形式在各领域中均有广泛应用,如企业增长模型、Logistic 映射、RC 电路等等。
1. 历史
1. 历史
一维连续动力系统的研究起源于 19 世纪末对常微分方程定性理论的探索。法国数学家亨利·庞加莱(Henri Poincaré)在其著作《天体力学新方法》(1892)中提出了通过几何方法研究微分方程解整体行为的思想,确立了相空间、轨道、不动点与稳定性等基本概念[1]。 在这一框架下,一维动力系统通常以自治常微分方程  为基本形式,其研究重点集中于不动点的存在性、稳定性及解的定性结构。这些思想构成了低维动力系统理论的基础[2]。
为基本形式,其研究重点集中于不动点的存在性、稳定性及解的定性结构。这些思想构成了低维动力系统理论的基础[2]。
随着动力系统理论的发展,一维连续系统逐渐成为研究非线性现象的重要模型。研究者系统地建立了相图、线性化方法以及稳定性判据,使得在不求显式解的情况下,也能够判断系统的长期行为。一维动力系统因此被广泛用于阐释非线性常微分方程的基本定性,并成为更高维系统研究的入门模型[3]。
在研究含参数的一维连续动力系统时,人们发现系统的定性结构可能随参数变化而发生突变,例如不动点的产生、消失或稳定性的改变。这类现象被统一描述为分岔(bifurcation)。一维系统在分岔理论的发展中起到了核心作用,典型分岔类型包括鞍结分岔、跨临界分岔和叉形分岔,一维动力系统由此成为研究非线性系统结构变化的标准模型[2][3]。
除连续时间模型外,一维离散动力系统作为相关研究方向逐渐发展。典型例子包括 逻辑斯谛映射 , 其在参数变化下可表现出倍周期分岔与混沌行为[4]。 尽管离散系统与连续一维动力系统在数学结构与动力学性质上存在显著差异,但二者在分岔机制、非线性分析思想以及复杂行为的产生方式上具有重要联系,离散一维系统通常被视为连续动力系统理论的补充研究方向[5]。
, 其在参数变化下可表现出倍周期分岔与混沌行为[4]。 尽管离散系统与连续一维动力系统在数学结构与动力学性质上存在显著差异,但二者在分岔机制、非线性分析思想以及复杂行为的产生方式上具有重要联系,离散一维系统通常被视为连续动力系统理论的补充研究方向[5]。
在现代动力系统理论中,一维连续动力系统被视为理解非线性动力学与定性分析方法的基础。其简单的相空间结构使系统行为能够被完整刻画,为研究稳定性、分岔以及更高维复杂系统提供了直观的理论起点,并在数学教育、物理建模和生物动力学等领域中被广泛作为非线性系统分析的典型示例[3][2]。
2. 主要内容
2. 主要内容
2.1 几何思维与相图表示
在一维动力系统的研究中,几何思维构成了理解系统长期行为的核心工具之一。一维连续动力系统通常写为自治常微分方程
 (1)
(1)
其中 x 表示系统的状态变量,t 为时间参数,f(x) 是定义在实数轴上的标量函数。该方程描述了系统状态在一维相空间(即实数轴)中的时间演化规律,是一维动力系统定性分析的基本出发点[3]。由于系统是自治的,时间本身并不作为相空间坐标出现,而仅起到参数的作用,这使得系统的几何结构完全由函数 f(x) 决定。
从几何角度看,f(x) 在实数轴上每一点给出了系统状态的瞬时演化方向与变化趋势。当 f(x) >0 时,状态随时间向正方向演化;当 f(x) <0 时,状态向负方向演化;而当 f(x) =0 时,系统处于静止状态,对应一个不动点。在一维情况下,通常所说的向量场退化为定义在实数轴上的方向场,其全部信息可以通过在 x-轴上标注箭头来直观表示。这种表示方式将微分方程转化为一条“流动方向图”,从而使系统的整体动力学结构在几何上变得清晰可见[5]。
通过考察不动点两侧 f(x) 的符号分布,可以直接判断不动点的稳定性:若轨道在不动点两侧均指向该点,则对应吸引子;若轨道在两侧均远离该点,则对应排斥子;若一侧指向而另一侧远离,则为半稳定不动点。这种稳定性判据完全基于几何信息,无需显式求解微分方程,因而构成了一维动力系统定性分析的基本方法之一[3]。
与依赖解析解或符号计算的方法相比,基于相图的几何分析能够在不求解方程的情况下揭示系统解的单调性、极限行为以及长期演化趋势。对于一维自治系统而言,这种方法在理论上是完备的:系统的全部定性行为均可由相图的结构刻画,同时也直接解释了一维系统中不可能出现周期轨道或振荡行为的根本原因。因此,几何思维不仅是研究一维动力系统的基础工具,也为理解更高维系统中的相空间结构提供了直观而重要的思想起点[5]。
一维动力系统的图,展示状态变量沿实数轴的演化方向与不动点结构[6]。
2.2 不动点及其稳定性
2.1.1不动点的定义
对于离散系统 xt+1=g(xt),满足 g(x)=x 的点 x* 称为 g 的不动点。
对于连续系统  ,称 f(x) 的零点为系统的不动点。
,称 f(x) 的零点为系统的不动点。
在离散动力学中,可以验证对不动点 x*,有 g(g(x*))=g(x*)=x*。直观上看,这个点在系统的映射下一直保持不动,因此也称其为系统的平衡解。在连续的一维动力学中,如果系统处在不动点的位置,即  ,系统状态同样保持不变。因此在一维连续动力学中,我们只需研究 f(x) 的零点。
,系统状态同样保持不变。因此在一维连续动力学中,我们只需研究 f(x) 的零点。
2.2.2 图形化稳定性判据
如果画出 f(x) 的图像,可以注意到有三种零点。前两种中 f(x) 的图像穿过实轴,在零点两侧函数值异号;第三种零点两侧的函数值同号。根据 f(x) 的几何意义,可以得出下面的三种不动点:
稳定不动点(吸引子/汇): 零点左侧为正,右侧为负;向量场箭头从两边指向该点。
不稳定不动点(排斥子/源): 零点右侧为正,左侧为负;向量场箭头从该点指向两边。
半稳定不动点: 零点的两侧同号;从一侧吸引,从另一侧排斥。
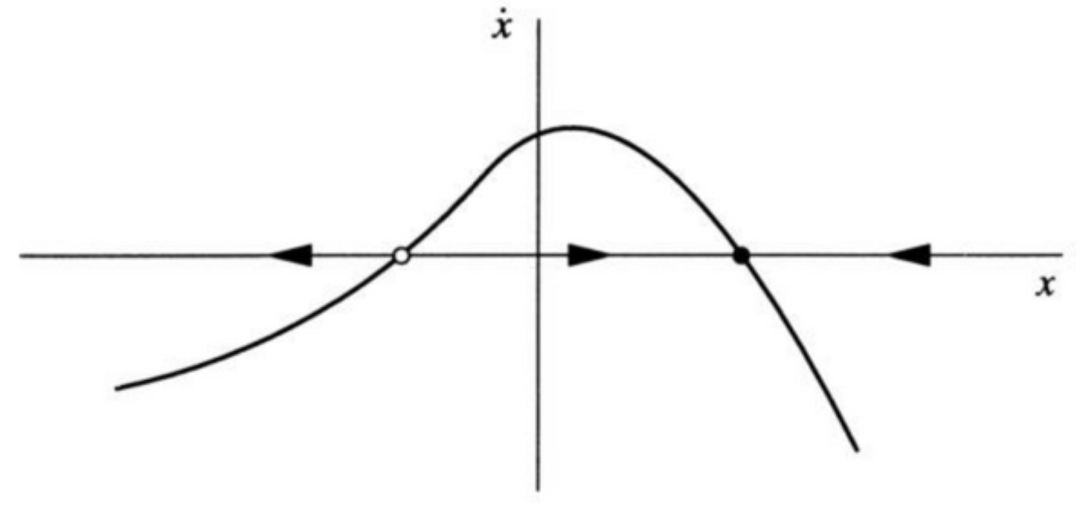
下图给出了一个一维自治系统的相图,横轴的箭头表示相流的流向。如图所示,函数 f(x) 有两个零点,这意味着系统有两个不动点。左侧的不动点是稳定的,当 x 位于左侧不动点的左侧少许时,其速度向右;当 x 位于它的右侧少许时,其速度向左。右侧不动点和左侧相反:向左侧或右侧扰动都会使系统状态远离右侧的不稳定不动点。
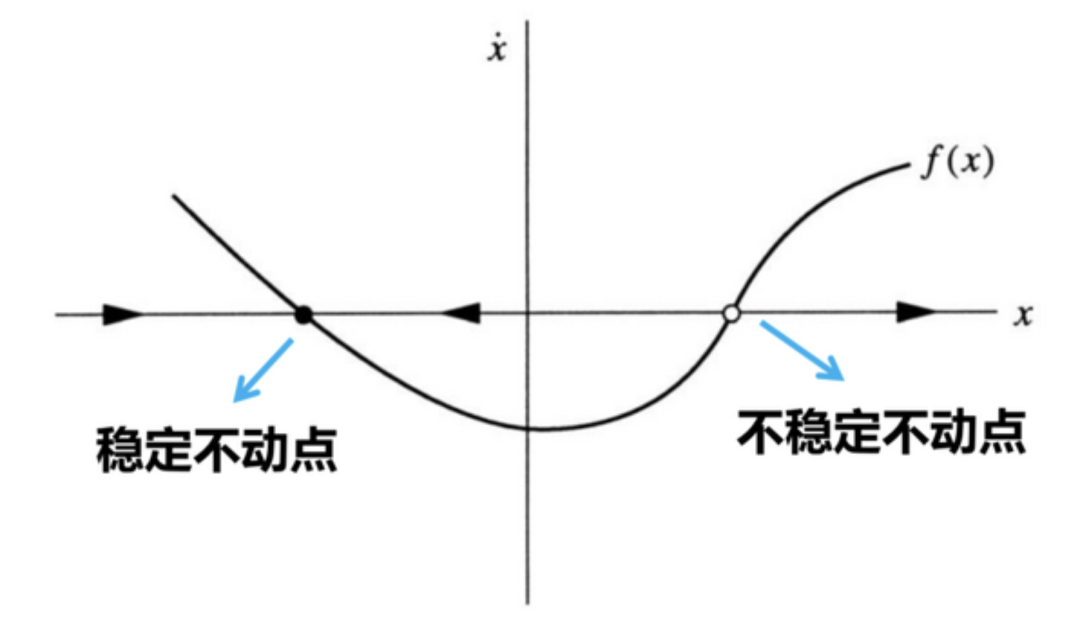
某个一维自治系统的相图。其稳定不动点和不稳定不动点分别使用实心圆点和空心圆点表示,箭头方向指示相流的方向。
2.2.3 线性稳定性分析(定量方法)
除了图形化稳定性判据,还可以从严格的数学角度判定该不动点的稳定性。在不动点x*附近定义扰动u(t)=x(t)-x*,其线性化方程为 ,此时我们关心f'(x*)的符号。
,此时我们关心f'(x*)的符号。
若 f'(x*)<0,该不动点是稳定不动点;
若 f'(x*)>0,该不动点是不稳定不动点。
定义特征时间尺度 ![]() 为 x(t) 在不动点 x* 邻域内发生显著变化的时间。
为 x(t) 在不动点 x* 邻域内发生显著变化的时间。
2.2.4 势函数
除了使用 f(x) 分析外,还可以使用系统的势函数 V(x) 进行分析。它由 定义。
定义。
通过该定义,系统行为等价于一个过阻尼粒子在势能景观 V(x) 中的运动。粒子总是向势能减小 (![]() ) 的方向运动。其中系统的稳定不动点 ↔V(x) 的局部极小值(势能谷),而不稳定不动点 ↔V(x) 的局部极大值(势能峰)。
) 的方向运动。其中系统的稳定不动点 ↔V(x) 的局部极小值(势能谷),而不稳定不动点 ↔V(x) 的局部极大值(势能峰)。
2.3 解的性质
2.3.1 单调性与振荡的不可能性
一维(自治)系统 的解 x(t) 必须是时间 t 的单调函数(或为常数)。换言之,一维系统的解要么是常数,要么收敛到不动点,要么发散到无穷。如上方系统的相图所示
如果相点初始位于左侧稳定不动点附近,它将收敛到稳定不动点;如果相点初始时恰好位于两个不动点处,则它将始终保持在原位;
如果相点初始位于不稳定不动点的右侧,可知相点的速度始终向右,且逐渐增加,因此它最终将发散至(正)无穷大。
作为单调性的直接推论,一维系统不可能出现周期解、超调或阻尼振荡。这是由实线的拓扑结构所决定的,假设某个一维自治系统的解是周期或存在超调,那么一定会存在某个状态,对应这两个不同的  ,这将违背自治系统解的唯一性,从而与常微分方程基本理论相矛盾。因此一维自治系统的解一定是单调的。
,这将违背自治系统解的唯一性,从而与常微分方程基本理论相矛盾。因此一维自治系统的解一定是单调的。
2.3.2 存在性与唯一性
在应用视角下,我们总是假定的一维系统  存在唯一的解。但一些看似简单的病态系统拥有不止一个解。例如考虑
存在唯一的解。但一些看似简单的病态系统拥有不止一个解。例如考虑  ,可以验证 x(t)≡0 和
,可以验证 x(t)≡0 和  都是原系统的解。究其原因,
都是原系统的解。究其原因, ![]() 在 x=0 处的斜率为无穷大,而该系统除了上面两个解外还有无穷多个解。
在 x=0 处的斜率为无穷大,而该系统除了上面两个解外还有无穷多个解。
下面给出了保证解存在性和唯一性的条件。
一维自治系统解的存在性与唯一性定理
若 f(x) 及其导数 f'(x) 在包含初始点 x0 的开区间上连续,则初值问题
 (2)
(2)
的解 x(t) 在 t=0 的某个邻域 (-Τ,Τ) 内存在且唯一。
考虑
 这一例子中的 f'(x) 在 x=0 处有无穷间断点,因此不满足存在性和唯一性定理的条件。注意该定理只是说解在初始时间的某个邻域内存在,而不是说解对所有时间都有存在。
这一例子中的 f'(x) 在 x=0 处有无穷间断点,因此不满足存在性和唯一性定理的条件。注意该定理只是说解在初始时间的某个邻域内存在,而不是说解对所有时间都有存在。考虑系统
 可以检查该系统符合上述定理的条件,在 t=0 的一个邻域内存在唯一解。解上述微分方程可得 x(t)=tan(t),可知只有当 t∈(-π/2,π/2) 时才有解。
可以检查该系统符合上述定理的条件,在 t=0 的一个邻域内存在唯一解。解上述微分方程可得 x(t)=tan(t),可知只有当 t∈(-π/2,π/2) 时才有解。
2.4 数值积分方法
数值积分方法(numerical integration methods)是通过将连续时间离散化,把常微分方程  (或更一般的,f(x, t))转化为逐步更新的递推关系,从而在离散时间点上近似计算系统轨道随时间演化的方法[7][8]。在动力系统问题中,解析解往往难以获得,而相图与轨道结构的定性研究又依赖对轨道的生成与比较,因此数值积分成为研究与数值实验中的基础工具之一[3]。
(或更一般的,f(x, t))转化为逐步更新的递推关系,从而在离散时间点上近似计算系统轨道随时间演化的方法[7][8]。在动力系统问题中,解析解往往难以获得,而相图与轨道结构的定性研究又依赖对轨道的生成与比较,因此数值积分成为研究与数值实验中的基础工具之一[3]。
从几何直觉上看,数值积分等价于在状态空间中用有限的时间步长 h 逐步逼近真实轨道:步长越小,局部逼近通常越好,但计算量也随之增加;步长过大则可能引入显著的截断误差,甚至导致数值轨道在定性行为上偏离真实解(例如出现错误的发散或虚假的稳定性)[8]。因此实际计算常需要在精度、稳定性与计算成本之间进行权衡[7]。
数值积分方法可按更新结构与稳定性特征粗略分为以下类别:
显式方法:下一步状态由已知的当前信息直接计算,如欧拉方法与各类 Runge–Kutta 方法;实现简单、计算效率高,但在刚性问题或强敏感系统中可能受到稳定性限制[8][9]。
隐式方法:下一步状态需通过求解代数方程获得,通常具有更好的稳定性,因此常用于刚性系统或需要较大步长的情形[8]。
多步方法:利用多个历史时间点的信息更新(如 Adams–Bashforth 与 Adams–Moulton 系列),在长时间积分中可提高效率,但对初始步的生成与误差传播较敏感[8]。
自适应步长方法:通过误差估计动态调整步长,在保证误差控制的同时减少不必要的计算,是工程与科学计算中常见的通用策略[9]。
在动力系统研究中,数值积分方法常用于生成相轨迹与时间序列、绘制相图并辅助分析不动点稳定性与分岔结构;对于混沌系统,数值结果对初值与误差传播更为敏感,因此通常更适合作为对定性结构与局部行为的数值探索工具,而不宜将单条长时间轨道视为精确预测[3][5]
关于具体算法形式与误差阶数,通常在各方法的独立条目中详细讨论,如欧拉方法、Runge–Kutta 方法等[7][9]。
3. 典型实例
3. 典型实例
3.1 种群增长模型(逻辑斯谛方程)
3.1.1 模型背景与动力学意义
逻辑斯谛方程(logistic equation)是一类用于描述有限资源环境下种群增长的常微分方程模型。该方程由比利时数学家皮埃尔·弗朗索瓦·费赫尔胡斯特(Pierre-François Verhulst)于 1838 年提出,最初用于解释人口增长过程中由资源限制引起的自我抑制现象,被认为是一维动力系统方法在种群生物学中的早期且经典的应用实例[10]。
从动力学角度看,逻辑斯谛方程刻画了种群数量在规模较小时近似呈指数增长,而随着资源竞争加剧,增长速度逐渐减慢并最终趋向某一稳定上限(环境承载量)的典型过程。这种由正反馈与负反馈共同作用所产生的 S 型增长行为,使该模型成为理解非线性反馈如何改变增长规律的入门范例,并在生态学、流行病学以及更一般的生物动力学建模中得到广泛应用[11]。
3.1.2 连续时间模型
在最常见的连续时间形式中,逻辑斯谛方程写为
 (3)
(3)
其中 N(t) 表示时间 t 的种群数量,r 为内禀增长率,K 为环境承载量。方程右端由两部分构成:rN 对应“数量越多增长越快”的自催化式增长趋势,而因子 1-N/K 则体现资源限制带来的负反馈,使得当 N 接近 K 时增长率趋于零,从而自然产生增长饱和并形成 S 型增长曲线[11]。系统的相图如下图所示:原点是系统的不稳定不动点。系统有一个稳定不动点 N=K,即为环境承载量。
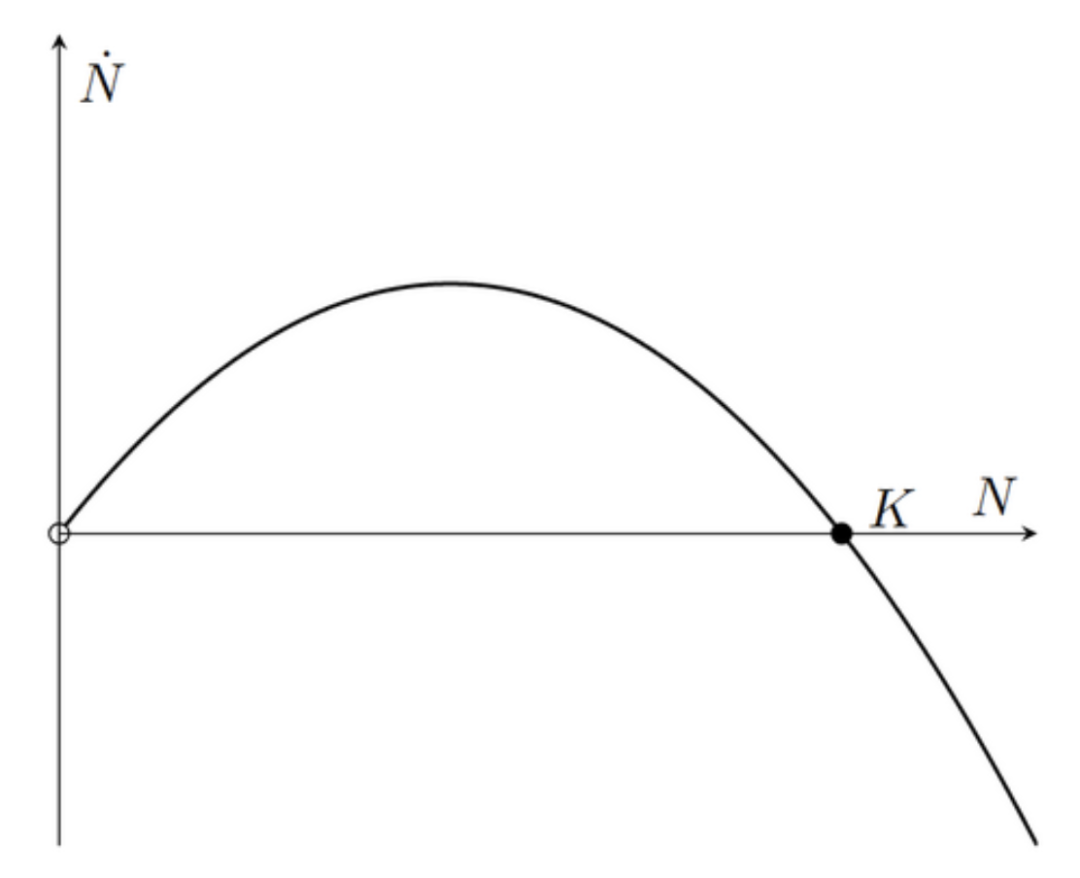
逻辑斯谛方程的相图,原点是系统的不稳定不动点。系统有一个稳定不动点 N=K,即为环境承载量。
在给定初值条件下,该方程可写出解析解
 (4)
(4)
其中常数 A 由初始种群数量决定。该解的曲线如下图所示,直观地展示了系统从早期快速增长到后期逐渐稳定在 K 附近的过渡过程。
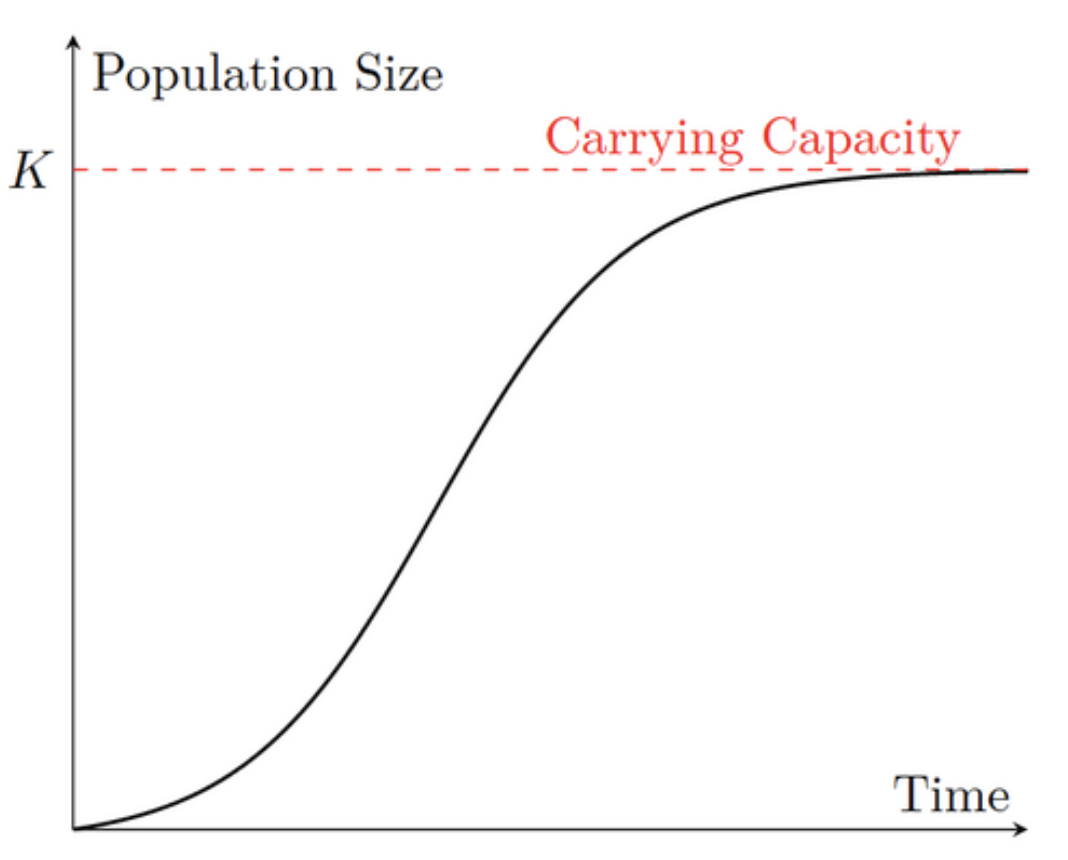
逻辑斯谛方程解的典型 S 型增长曲线示意图,展示种群数量随时间增长并逐渐趋近环境承载量的行为。
3.1.3 离散模型与应用拓展
除连续时间形式外,逻辑斯谛方程在离散时间建模中也有一个极其重要的对应物:逻辑斯谛映射(logistic map)
xn+1=rxn(1-xn) (5)
该映射在参数变化下可呈现从稳定定点到周期轨道、再到倍周期分岔与混沌等丰富动力学行为,因此常被作为一维离散动力系统与混沌理论的经典示例[12]。
逻辑斯谛模型及其变体广泛用于生态学中的种群增长描述,也常作为更复杂模型(例如加入时间延迟、空间扩散或随机扰动)的基准框架;此外,其 S 型增长形态也被借用到社会科学中的技术扩散与增长过程刻画中,并在形式上与统计学中的逻辑斯谛回归等方法产生联系[11]。
3.2 RC电路分析
3.2.1 模型定义
考虑下图所示的 RC 电路,电阻大小为 R ,电容量为 C 。记左端输入电压为 Vin,电容器两端的电压 VC 为输出电压,电路中的电流为 I。由于![]() ,电容器上的电荷量 Q 遵循下面的微分方程
,电容器上的电荷量 Q 遵循下面的微分方程
 (6)
(6)
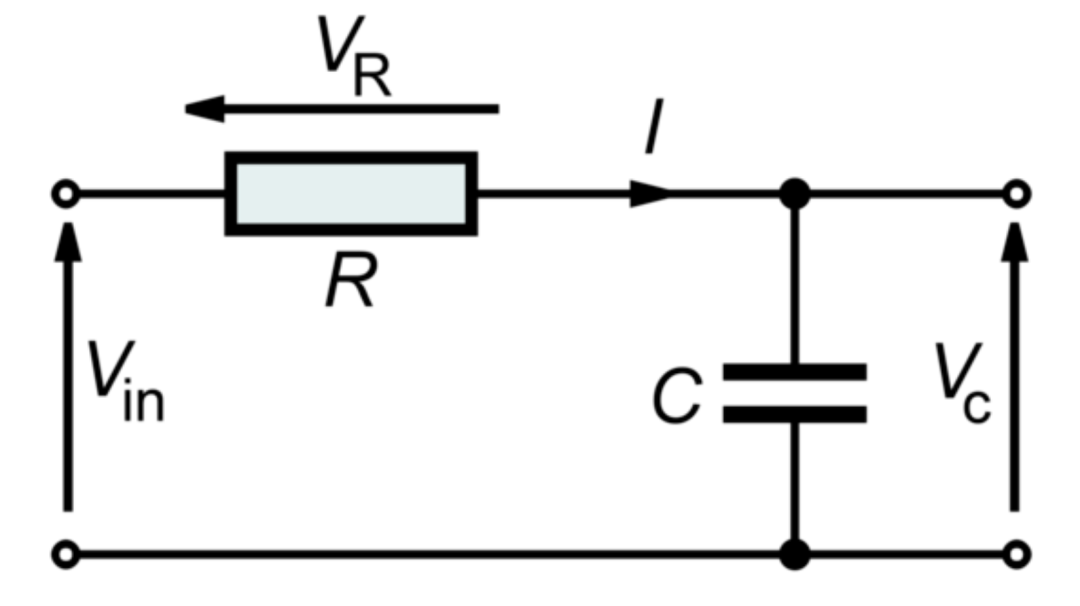
串联RC电路,左侧为输入电压,电阻值为 R,电容量为 C,输出电压为电容两端的电压。引自[13]
3.2.2 推导过程
根据基尔霍夫定律,可得
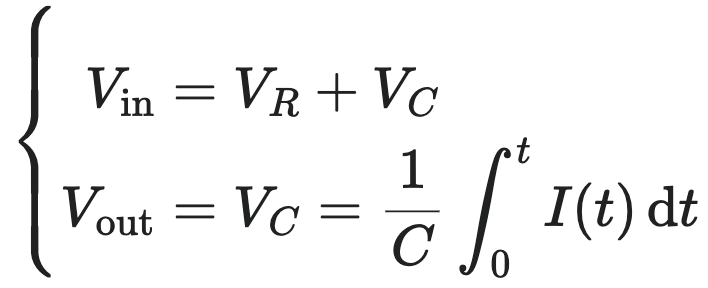 (7)
(7)
即
 (8)
(8)
当 Vin 为恒定电压 V0 时,考虑电容 C 上的电荷量 Q 。有
 (9)
(9)
将公式(9) 中的 ![]() 整理至等号左边,就得到系统(关于电量Q)的动力学为
整理至等号左边,就得到系统(关于电量Q)的动力学为 。
。
3.2.3 模型的解
在上述设定条件下,系统动力学(公式 (6))的通解为
 (10)
(10)
如果要求初始时刻电容器上电荷量为零,即 Q(0)=0,则有 K=-V0C,即
 (11)
(11)
相应地,也能得到电容器的稳态电荷量Q(∞)=V0C,因此其稳态电压 VC(∞) 为 V0,输出电压随时间变化规律为  ,其中 Τ=RC 称为时间常数,它决定电容器充电的快慢。
,其中 Τ=RC 称为时间常数,它决定电容器充电的快慢。
3.2.4 相图视角
公式(6)对应着如下图所示的RC串联电路系统相图,可见相图中为一截距为正,斜率为负的直线,有一个全局稳定不动点 Q*=V0C。另外,从该函数也可明显的看出上面的结论:当电容初始电荷量为零时,依该函数,其电荷量会一直增长,无限趋于稳定不动点。
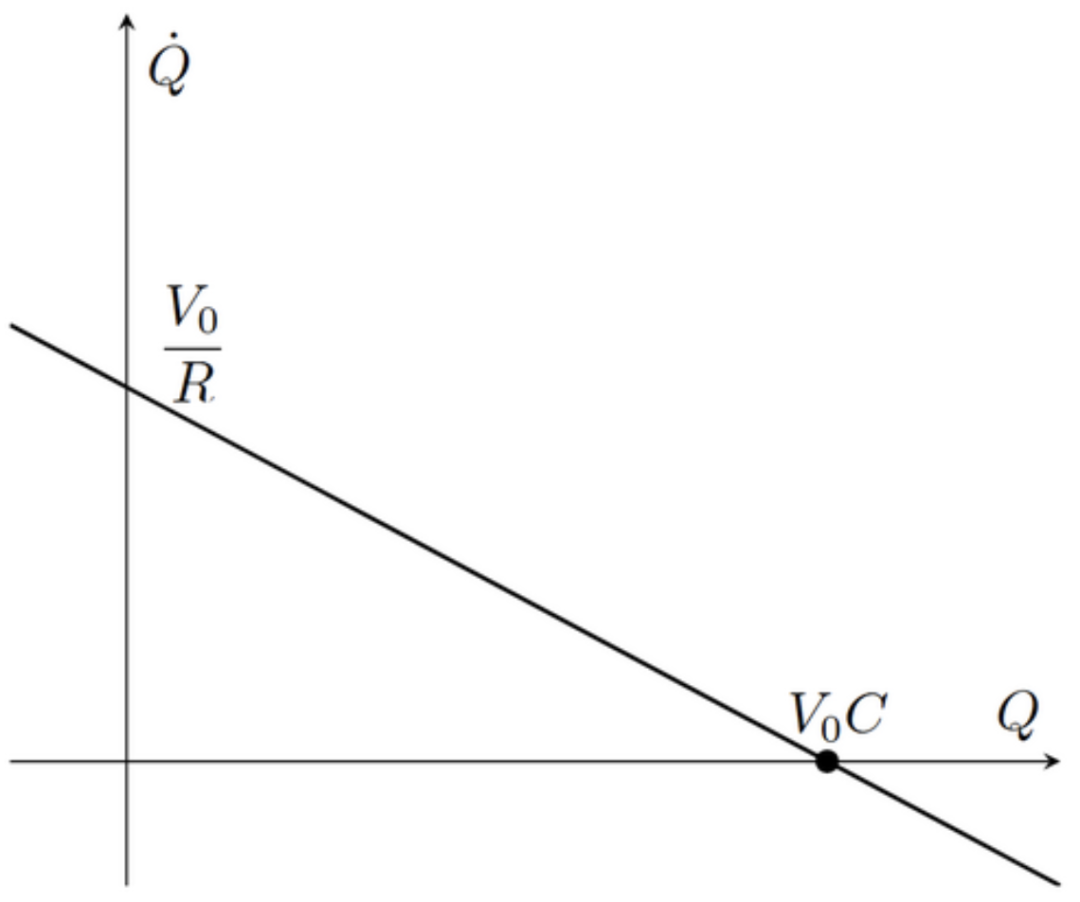
RC 电路系统的相图。横轴为电容器的电荷量Q,纵轴为电容器电荷量的变化率![]() 。该系统的相图为一斜率为负的直线,和横轴的交点为 Q*=V0C,即为系统的稳定不动点。
。该系统的相图为一斜率为负的直线,和横轴的交点为 Q*=V0C,即为系统的稳定不动点。
3.3 企业生长模型
企业生长模型是陶如意、张江、Geoffrey West等人提出的、基于企业规模标度律和企业财务平衡方程构建的企业资产变化的微分方程,刻画企业的平均生长动力学。
3.3.1 数学形式
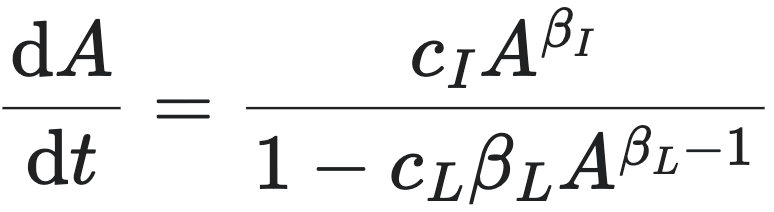 (12)
(12)
其中:
A是企业的资产
cI和βI代表企业的资产和企业净利润I之间幂律关系的参数(
 )
)cL和βL代表资产和企业总债务L之间的幂律关系参数(
 )
)
上式被称为企业普适生长方程(general growth equation)。
3.3.2 解的形式
对公式(12)直接积分,难以给出资产随时间的显式解析表达式,但可以给出企业资产生长轨迹的隐式解
 (13)
(13)
公式(13)被称为企业通用生产曲线(general growth curve),其中,t 是企业的市场年龄。下图展示了个体企业时间轨迹在平均尺度上和模型预测的吻合情况,结果显示,在美国、中国和欧洲的上市企业数据集中,模型表现和数据吻合,详见下图。
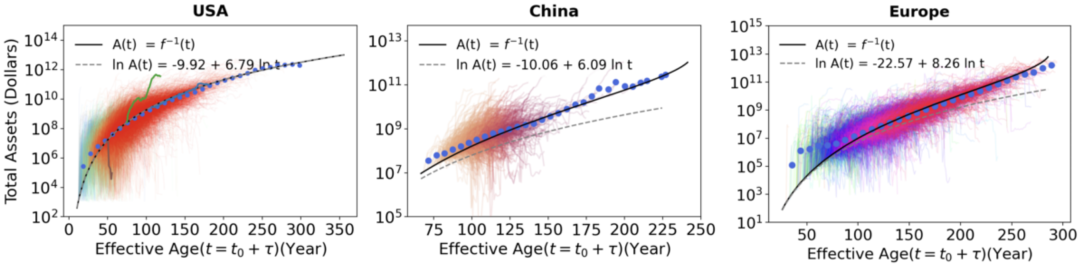
企业生长曲线在中国、美国、欧洲的上市企业数据集上的拟合结果。纵坐标是企业的资产,横坐标是根据通用生长方程经过对齐后的企业的有效年龄(Effective Age),可见与企业增长模型的解与实际数据集吻合。
当 β≈1 的时候,可以得到一个极佳的近似,此时企业生长方程的解是一个随时间变化的幂律形式:
 (14)
(14)
其中

3.3.3 不动点分析
分析企业生长方程的动力学性质,我们可知,方程只有一个不动点A=0,该点意味着企业的资产为0,考虑到企业资产往往不会出现为0的情况,该点通常并无实际的经济意义。
3.3.4 奇异点分析
进一步分析可知,方程存在奇异点,即分母为0的情况,此时dA/dt→∞。下面我们对奇异点A*展开分析。
令分母 ,得到奇异点
,得到奇异点 。
。
3.3.4.1 稳定性
对奇异点进行稳定性分析,即判断  的正负。我们得到两种情况:
的正负。我们得到两种情况:
当 βL>1 时,
 ,意味着此时奇异点是一个吸引子,企业生长靠近该点。
,意味着此时奇异点是一个吸引子,企业生长靠近该点。当 βL<1 时,
 ,意味着此时奇异点是一个排斥子,企业规模远离该点。
,意味着此时奇异点是一个排斥子,企业规模远离该点。
下图展示了不同βL取值情况的企业生长轨迹及其变化率的可视化图像:
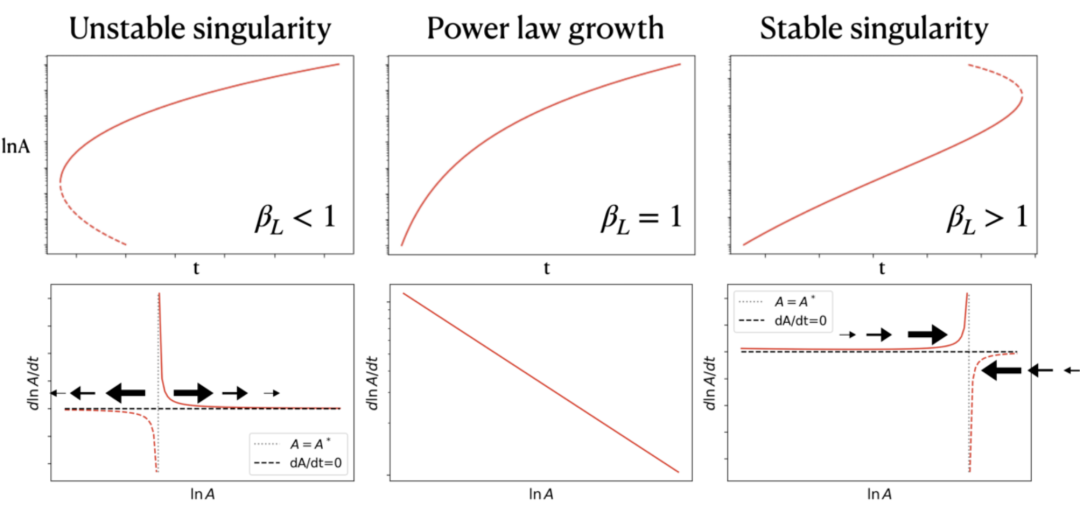
企业生长轨迹及其变化率和不同参数的关系。第一行子图表示企业规模(对数坐标)随着时间t的演化轨迹。第二行子图表示企业对数生长率和企业(对数)规模的函数关系,图中的箭头代表企业规模变化的速度,箭头越粗代表变化越快。左、中、右分别代表βL<1, =1, >1三种不同的参数情况。βL<1时,企业生长方程存在一个左奇异点,该点是不稳定的;βL=1时,企业是一个幂律生长;βL>1时,企业生长方程存在一个右奇异点,且该点是一个稳定的奇异点。
3.3.4.2 经济含义
对应到企业生长行为,也可以分成对应两种类型的生长阈值:
当βL>1时,由于此时奇点是一个吸引子,意味着小于规模奇点A*的企业可以持续增长,而大于规模奇点A*的企业则表现为衰退,此时奇点A*是一个生长上限。
而当βL<1时,由于此时奇点是一个排斥子,意味着大于规模奇点A*的企业可以持续增长,而小于规模奇点A*的企业则表现为衰退,此时奇点A*是一个生长门槛。
参考文献
参考文献可上下滑动查看
创作新词条:覆盖复杂系统、人工智能等前沿领域
迭代经典内容:更新现有词条,守护知识的准确性与时效性
质量守护者:参与内容校对审核,共建精品知识库
集智读书会成员(需完成一期字幕任务)
拥有清晰表达复杂概念的写作能力
对特定领域有深度研究或强烈兴趣
具备信息检索与整合素养
怀揣责任感与协作精神,愿为知识共享赋能
百科积分(支持兑换集智俱乐部周边:文化衫、复杂科学知识卡以及提现)
集智俱乐部创始人张江教授亲自指导写作
科研志愿者晋升通道:表现优异者可加入张江教授科研团队从事科研志愿者
本词条由集智俱乐部众包生产,难免存在纰漏和问题,欢迎大家留言反馈,一经采纳,可以获得对应的积分奖励噢!
加入我们
亲爱的社区伙伴与知识探索者:
我们诚挚邀请热爱知识分享的您,加入集智百科词条编写志愿团队!无论您是领域专家,还是对特定主题充满热忱的学习者,这里都有您的舞台。通过编写百科词条,您将为全球读者传递权威知识,同时获得专家指导与个人能力跃升的双重成长。
📝 志愿者职责
🌟 我们期待您
🎁 您将收获
你的百科贡献之路,从一字一句开始!
第一步,从成为一名字幕志愿者开始!
只需完成一期读书会讲座字幕任务,这不仅是贡献,更是一次深度的学习。字幕任务过关后,您将升级为“百科志愿者”,开启编辑词条、整理术语的进阶旅程。
从字幕到百科,这是一条清晰的成长路径。立即行动,从第一个任务开始你的升级吧!

扫码加入
报名读书会:「非线性动力学与混沌」
集智俱乐部联合北京师范大学张江科研组联和南信大李春彪科研组师生共同发起「非线性动力学与混沌」读书会,由师生共同领读《非线性动力学与混沌》,以分章节精读的方式,带领大家系统学习非线性动力学的基本理论与典型模型,结合洛伦兹系统、Kuramoto模型等经典案例,深入探讨混沌的起源、分形与奇异吸引子等前沿问题。
本读书会不仅读书,还会系统化地梳理本书中的重要概念,并整理为百科词条。也就是说,读完本书,我们会梳理出一套非线性动力学与混沌相关的百科词条,这才是重点。
我们也会通过梳理词条的方式,让学员组成学习小组进行比赛,最终会评出优秀学习小组获得复杂科学知识卡、汪小帆签名的《非线性动力学与混沌》、张江签名的《规模法则》、以及译者签名的《复杂-诞生于混沌与秩序边缘的科学》以及特色集智文化衫!
详情请见:真正的读“书”会来了——张江、李春彪邀你一起读《非线性动力学与混沌》
报名读书会:「非线性动力学与混沌」
集智俱乐部联合北京师范大学张江科研组联和南信大李春彪科研组师生共同发起「非线性动力学与混沌」读书会,由师生共同领读《非线性动力学与混沌》,以分章节精读的方式,带领大家系统学习非线性动力学的基本理论与典型模型,结合洛伦兹系统、Kuramoto模型等经典案例,深入探讨混沌的起源、分形与奇异吸引子等前沿问题。
本读书会不仅读书,还会系统化地梳理本书中的重要概念,并整理为百科词条。也就是说,读完本书,我们会梳理出一套非线性动力学与混沌相关的百科词条,这才是重点。
我们也会通过梳理词条的方式,让学员组成学习小组进行比赛,最终会评出优秀学习小组获得复杂科学知识卡、汪小帆签名的《非线性动力学与混沌》、张江签名的《规模法则》、以及译者签名的《复杂-诞生于混沌与秩序边缘的科学》以及特色集智文化衫!
推荐阅读
点击“阅读原文”,报名读书会
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢