
论文标题:Siamese Anchor Proposal Network for High-Speed Aerial Tracking 论文链接:https://arxiv.org/abs/2012.10706 代码链接:https://github.com/vision4robotics/SiamAPN 作者单位:同济大学, 纽约大学 表现SOTA!性能优于SiamRPN++、SiamFC++等网络,速度可高达200 FPS!代码刚刚开源!
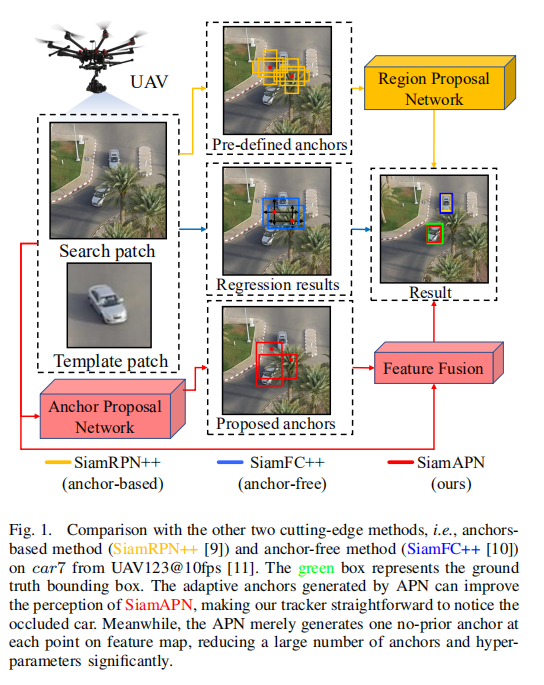
在视觉跟踪领域,大多数基于深度学习的跟踪器都强调准确性,但抛弃了效率,从而阻碍了它们在无人飞行器(UAV)等移动平台上的实际部署。在这项工作中,提出了一种新的基于两阶段孪生网络的空中跟踪方法,阶段1:用于生成高质量anchor proposal,阶段2:用于优化anchor proposal。与具有众多预定义固定大小anchor的基于anchor的方法不同,我们的无先验方法可以:1)使跟踪器具有鲁棒性和通用性,适用于各种大小的不同对象,尤其是复杂情况下的小型,遮挡和快速移动的对象根据自适应anchor生成的场景,2)由于anchor数量的大幅减少,使得计算可行。此外,与anchor-free方法相比,由于在第2阶段的改进,我们的框架具有更好的性能。在三个基准上进行的全面实验证明了我们方法的最新性能,其速度约为200帧/秒。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢