
【论文标题】Deep Learning Based Intelligent Inter-Vehicle Distance Control for 6G Enabled Cooperative Autonomous Driving 【作者团队】Xiaosha Chen, Supeng Leng, Jianhua He, Longyu Zhou 【发表时间】2020/12/26 【机构】成都电子科技大学&英国埃塞克斯大学 【论文链接】https://arxiv.org/pdf/2012.13817.pdf 【推荐理由】本文出自成都电子科技大学以及英国埃塞克斯大学,互联网自动驾驶(CAV)依靠6G网络将是主要的发展方向,但是存在6G网络可靠性、延迟和高速通信的挑战,针对该问题,本文研发了协作驾驶方案,大大提高了道路安全性、通行能力和效率。
互联自动驾驶(CAV)是6G的关键垂直领域,具有改善道路安全,道路和能源效率的巨大潜力。但是,CAV应用程序对可靠性,延迟和高速通信的严格服务要求将给6G网络带来巨大挑战。支持6G的CAV需要新的互联车辆通道访问算法和智能控制方案。 在本文中,作者团队研究了6G支持的协作驾驶,这是一种通过信息共享和驾驶协调实现的高级驾驶模式。首先,他们使用混合通信和信道访问技术量化了6G车辆到车辆(V2V)通信的延迟上限。开发了深度学习神经网络并对其进行了训练,以便在实时操作中快速计算延迟范围。然后,设计了一种智能策略来控制车辆间的距离,以进行协作式自动驾驶。此外,还提出了一种基于马尔可夫链的算法来预测系统状态的参数,并且提出了一种安全的距离映射方法来实现平稳的车速变化。拟议的算法在AirSim自动驾驶平台中实现。仿真结果表明,所提出的算法有效,鲁棒,安全稳定的协同自动驾驶,大大提高了道路安全性,通行能力和效率。
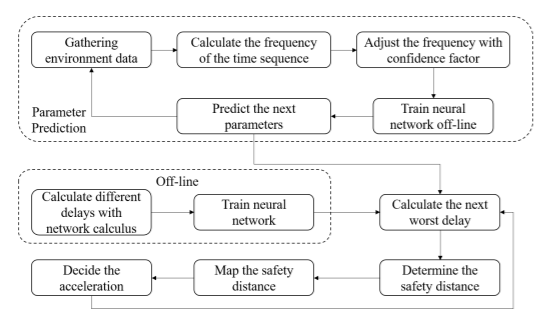
下图为本文研发的智能距离控制策略流线图。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢