
年份:2026
下载地址:
请索引第66本书籍
 |  |
引言
本书内容简介
《机器人人工智能》将机器人技术重新定义为人工智能问题。现代机器人技术正因人工智能的突破而不断变革。本书将全面指导您如何将传统的机器人问题转化为人工智能问题,并运用深度学习技术来解决这些问题。无论您是程序员、爱好者还是投资者,《机器人人工智能》都能为您提供创建通用且数据驱动的机器人智能的蓝图,使其能够在动态的真实环境中学习、进化并应对我们曾经认为不可能的挑战。
本书结构
本书旨在循序渐进地构建您对人工智能在机器人领域应用的理解,从基本概念入手,逐步深入到高级应用。
• 第一章:通用机器人导论
概述机器人技术的现状和未来发展方向,重点阐述机器学习在构建更通用、更智能的系统中的作用。
• 第二章:机器人感知:传感器与图像处理
介绍机器人如何通过传感器和图像处理技术感知周围环境的基础知识,重点讲解视觉任务的表征学习。
• 第三章:机器人感知:三维数据与传感器融合
探讨如何处理和整合来自各种传感器的三维数据,从而构建对机器人周围环境的连贯理解。
• 第四章:机器人基础模型
讨论大型预训练模型在机器人领域的应用,包括语言模型和视觉语言模型,以及如何将其应用于机器人领域。
第五章:仿真
详细介绍了如何使用合成数据和仿真环境来训练和测试机器人,包括仿真到实际的迁移技术。
• 第六章:地图构建、定位和导航
重点介绍机器人用于绘制周围环境地图、理解自身位置以及在环境中导航的技术。
• 第七章:强化学习和控制
介绍强化学习和控制策略,用于教会机器人自我改进并从试错中学习。
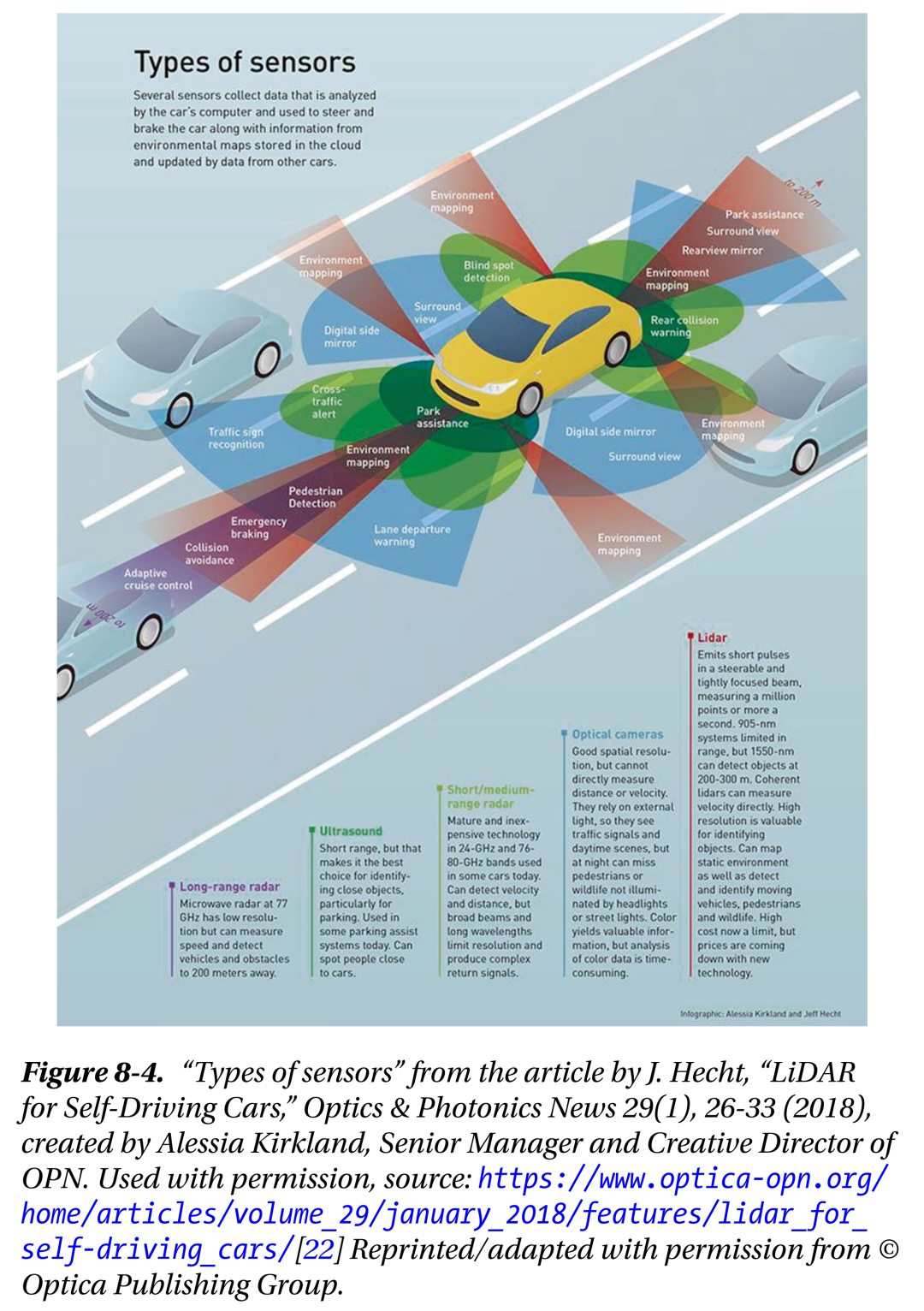
• 第八章:自动驾驶车辆
阐述了构建自动驾驶车辆所涉及的设计、安全考虑因素和技术挑战。
• 第九章:工业机器人
涵盖了机器人技术在工业环境中的应用,包括制造和仓储自动化,以及如何将机器学习集成到这些流程中以增强其性能。
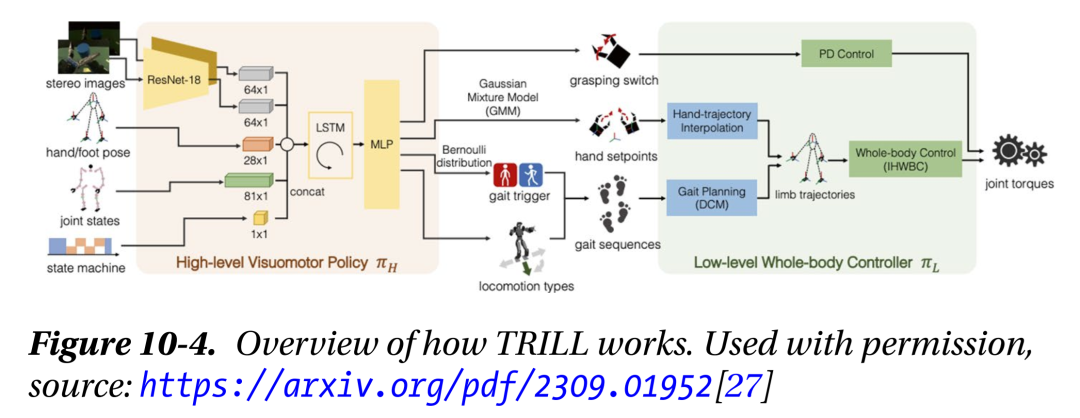
• 第十章:人形机器人
深入探讨了开发人形机器人所面临的独特挑战和机遇,包括感知、硬件和软件设计。
• 第11章:数据驱动机器人技术实践
讨论支持数据驱动机器人技术所需的基础设施,包括重要考虑因素、安全问题和未来发展方向。
 微信群
微信群


内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢