
皮肤作为生物体外部环境和内部成分之间的屏障,对生物系统起着至关重要的作用。在它的各层中嵌入了一个由机械、化学、振动、温度和疼痛感受器组成的密集网络,这些感受器协同工作,使皮肤能够进行体感。这些能力对机器人也非常有用。电子皮肤(e-Skin)研究最初的部分动机是希望了解生物传感,但从中吸取的经验教训可以帮助改进机器人系统的设计。为了感知、规划和行动,机器人需要在它们的全身嵌入各种传感器,以便它们能够获得有关环境的信息。其中,软机器人因其在材料层面的固有的安全性而引起了人们对实际应用的兴趣。然而,随着柔性和可伸缩材料引入机器人系统,传感器的集成面临着无数的挑战,包括能够伸展的多模式传感,嵌入高分辨率但大面积的传感器阵列,以及随着数据量的增加而进行的传感器融合。
基于此,美国加州大学圣地亚哥分校Michael T. Tolley教授团队综述探讨了电子皮肤和机器学习的融合,重点关注机器人专家如何结合这两个领域的最新发展,构建自主的、可部署的软机器人,并集成信息触摸和本体感受的能力,以应对现实环境的挑战。
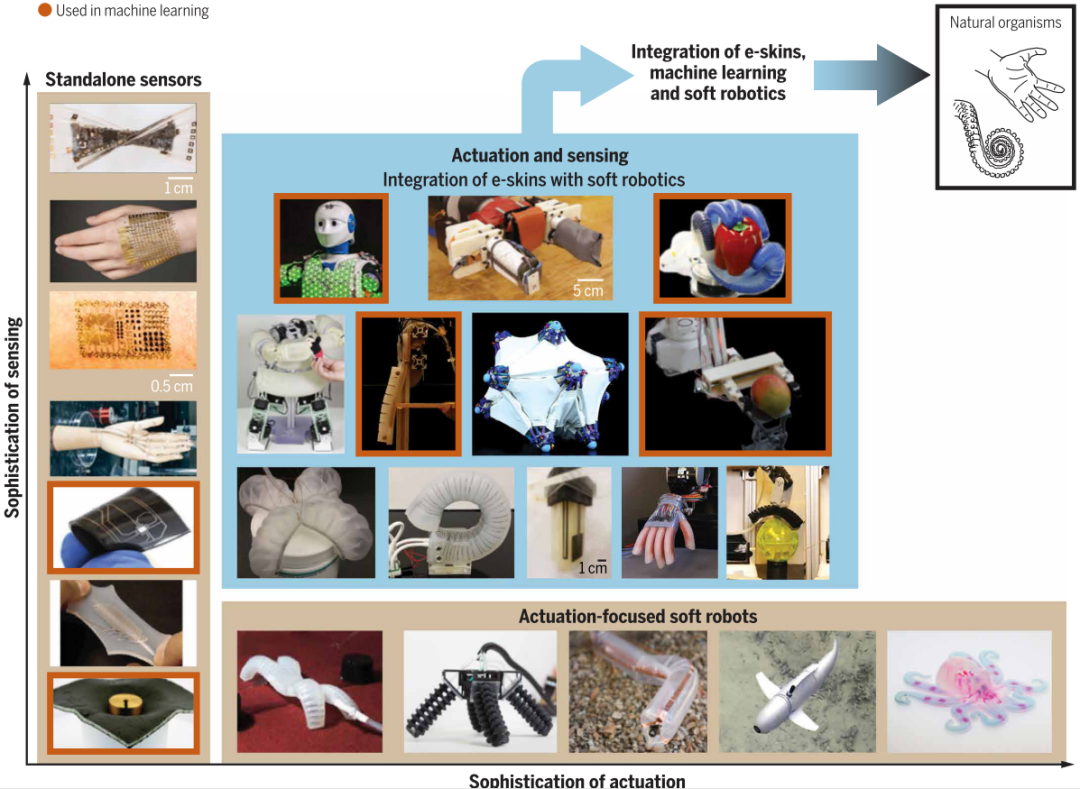 图1电子皮肤、软机器人和机器学习交叉领域的发展趋势
图1电子皮肤、软机器人和机器学习交叉领域的发展趋势
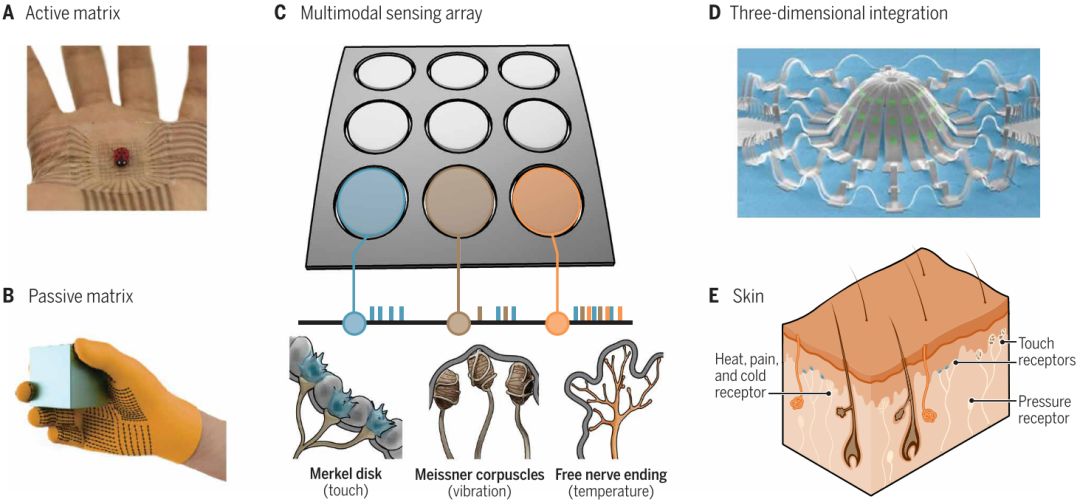 图2传感器阵列使电子皮肤能够提取有关其环境的信息
图2传感器阵列使电子皮肤能够提取有关其环境的信息
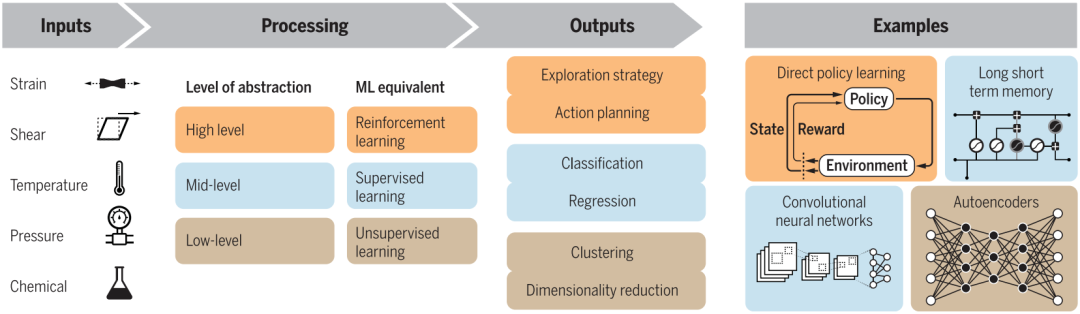 图3用于处理原始感觉信息的机器学习技术、帮助机器人感知的不同级别的抽象以及动作规划
图3用于处理原始感觉信息的机器学习技术、帮助机器人感知的不同级别的抽象以及动作规划
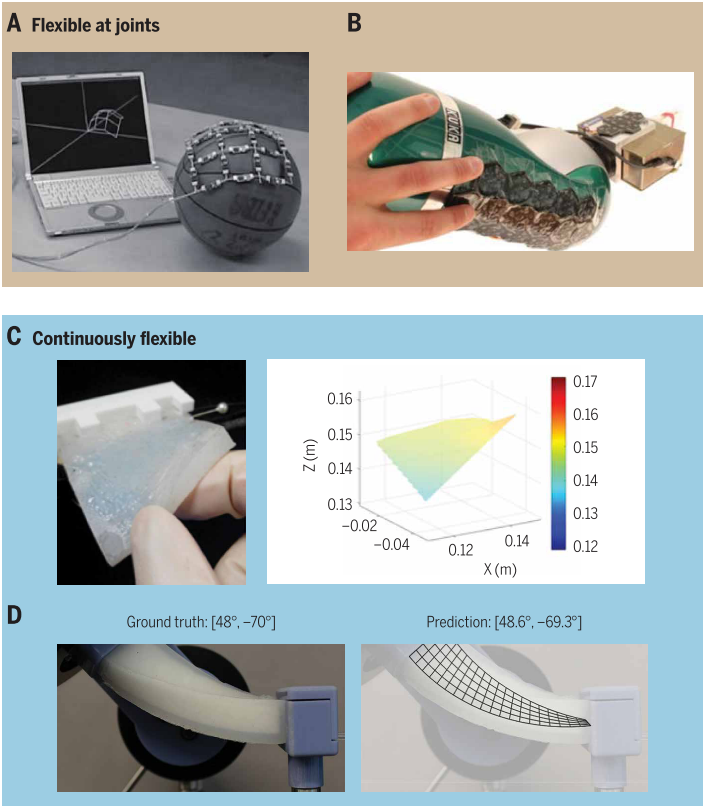 图4可在三维空间中感知其形状的电子皮肤
图4可在三维空间中感知其形状的电子皮肤
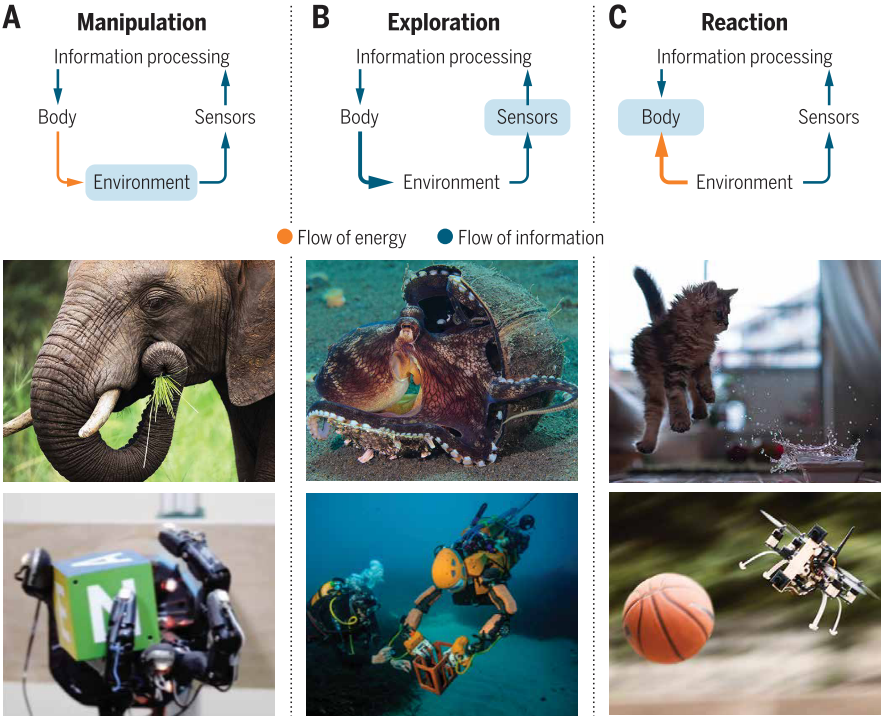 图5触觉感知必不可少的闭环任务
图5触觉感知必不可少的闭环任务
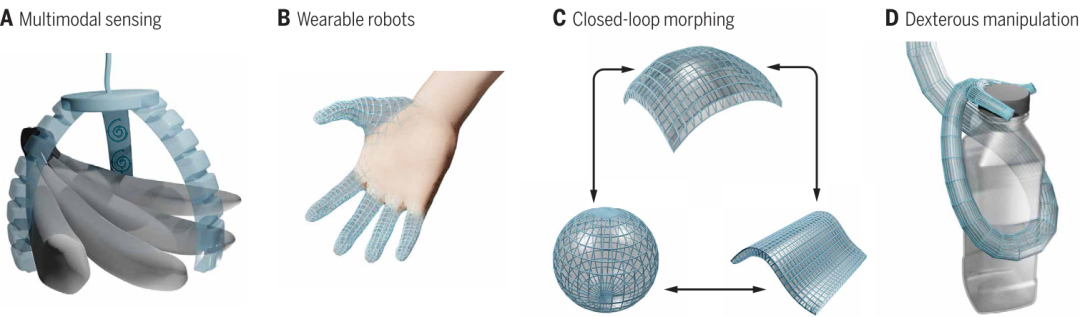 图6电子皮肤和软机器人可以实现的潜在功能和技术
图6电子皮肤和软机器人可以实现的潜在功能和技术
以上研究以“Electronic skins and machine learning for intelligent soft robots”为题,发表在Science Robotics(DOI: 10.1126/scirobotics.aaz9239)上。第一作者为美国加州大学圣地亚哥分校的Benjamin Shih,通讯作者为美国加州大学圣地亚哥分校的Michael T. Tolley教授。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢