
【论文标题】Spatial Attention Improves Iterative 6D Object Pose Estimation 【作者团队】Stefan Stevsiˇc,Otmar Hilliges 【发表时间】2021/1/5 【机构】苏黎世联邦理工学院 【论文链接】https://arxiv.org/pdf/2101.01659.pdf
【推荐理由】 本文出自苏黎世联邦理工学院,作者针对 6D 姿态估计的精修任务,提出了一种基于空间注意力机制的新型姿态估计精修网络,可以充分利用空间细节信息,进行细粒度推理。实验结果表明,本文提出的方法优于目前最先进的方法。
根据 RGB 图像中估计一个物体的 6D 姿态的任务包含两个主要步骤:(1)初始姿态估计(2)正确地配准对象及其观测数据的精修过程。在本文中,作者提出了一种新的基于 RGB 图像的 6D 姿态估计的精修方法。
为了获得高准确率的最终估计,我们需要对齐观测数据和渲染模型。在本文作者看来,在初始姿态估计之后,为了提高对齐过程中的估计准确率,我们需要关注目标的不同空间特征。此外,在对齐过程中,图像中被遮挡的部分对象应该被赋予更少的权重。大多数最先进的精修方法不并不支持这种细粒度的推理,也不能充分利用问题的结构。在本文中,作者提出了一种基于空间注意力机制的新型神经网络架构,从而在姿态精修过程中识别并利用空间细节信息。
实验结果表明,本文提出的方法可以学会注意显著的空间特征并忽略对象的遮挡部分,从而在多个数据集上得到更好的姿态估计结果。作者在 6D 姿态估计的标准对比基准数据集(LineMOD 和 Occlusion LineMOD)上进行了实验,模型的性能超越了之前最先进的方法。
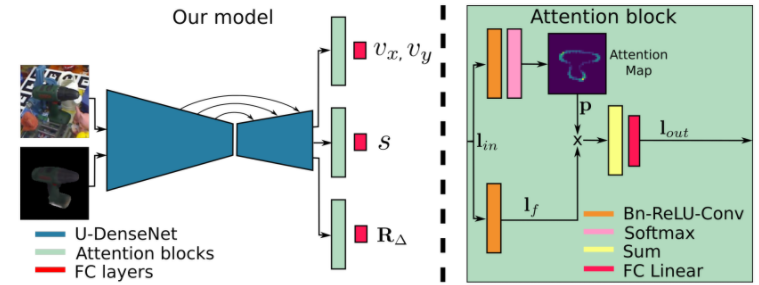
本文的主要贡献如下: (1)利用空间注意力机制提出了一种新型 6D 姿态精修神经网络。 (2)为 6D 姿态估计任务提出了一种详细的实验评价方法。 (3)实验结果表明本文提出的空间注意力机制使网络能够分理出独特的物体细节,并且在预测中排除遮挡效果。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢