
日前,来自哈佛大学的科学家们就从鱼群中汲取灵感,研发出了一批水下机器人,这种机器人可以像真正的鱼群一样同步运动,且不需要任何外部控制。同时,他们也首次利用水下机器人展示了具有隐性协调的复杂三维集体行为,该论文发表在《科学机器人》(Science Robotics)上,并被遴选为 2021 年 1 月份的月度封面。
论文地址:https://robotics.sciencemag.org/content/6/50/eabd8668
 图注:Science Robotics 2021年1月封面
图注:Science Robotics 2021年1月封面
事实上,通过科研人员的编程工作,成群的、有组织的机器人运动,对人们来说并不陌生。 但与空、地机器人相比,水下机器人尚未实现类似的组织水平,其中一大障碍便是传统的地上通信方法(比如无线电)在水下的性能很差,而且位置定位方法(比如 GPS)几乎不可用。怎样才能用更低成本让机器人群像鱼群一样,具有无缝、连贯的协调性和高度的可操作性,并且独立于外界辅助技术呢?这就是组织水下机器人群体运动的研究难点。
论文作者伯林格是哈佛大学约翰·保尔森工程与应用科学学院(SEAS)和怀斯生物启发工程研究所的一名博士,他所在的研究小组给出了一种解决方案:给每个机器人小鱼装配上 LED 灯,并基于此开发了一套水下视觉协调系统。这项研究中,单只机器小鱼被命名为“Bluebot”,研究人员共组装了 7 只,它们组成的系统则被称为“Blueswarm”。
Bluebot 的功能设计包括三个主要模块:
- 2 个摄像头可对周围环境进行 3D 感知;
- 3 个 LED 灯作为主动信标,用于相互识别;
- 4 个独立可控鳍片可提供 3D 空间游动。
机载鱼眼镜头相机可检测到最远 5m 相邻 Bluebot 的 LED 灯光和闪烁信号,并使用自定义算法确定其距离、方向和航向。
仅使用基于视觉的局部交互,研究人员报告了几个自组织的水下机器人集体行为示例,这些行为包括协调同步时间,空间受控分散和动态旋转运动等,最后以多种行为的组合来实现搜索任务操作。
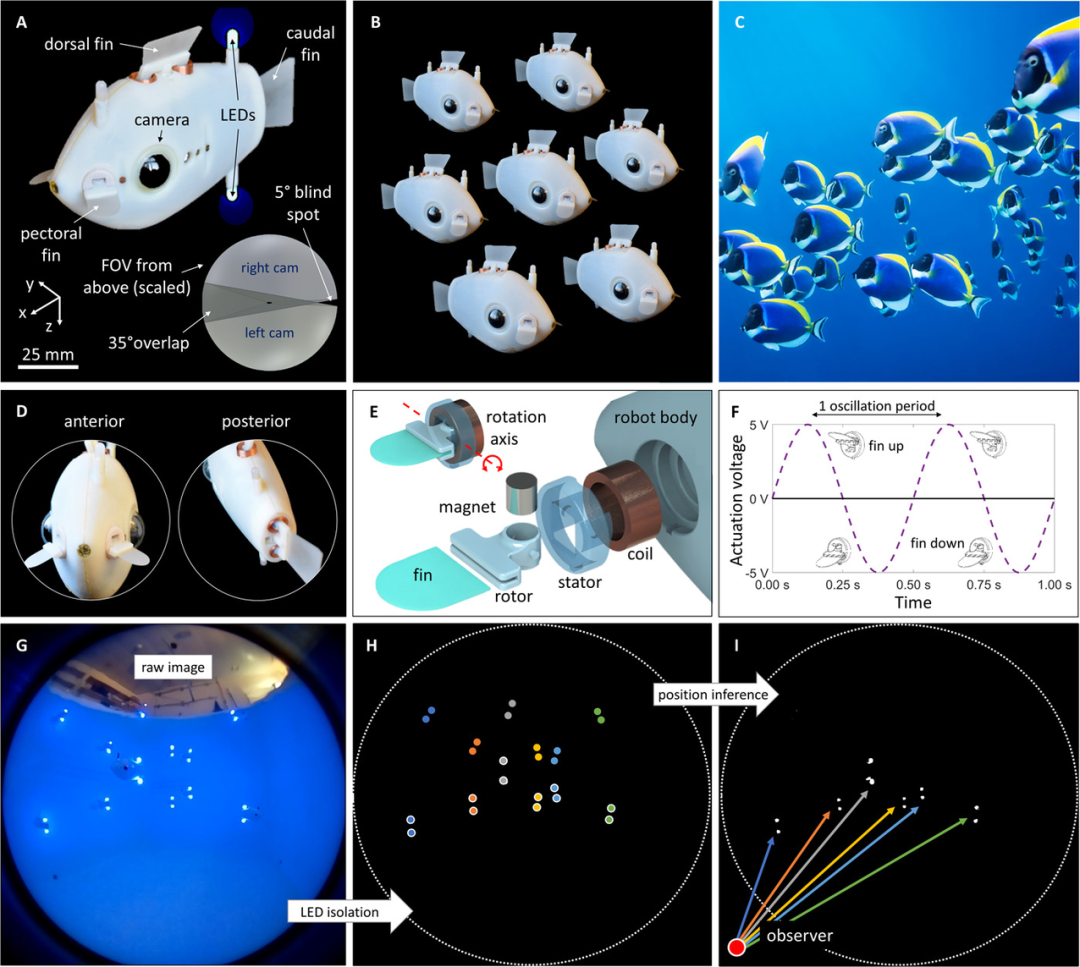 图注:Blueswarm 平台(来源:Science Robotics)
图注:Blueswarm 平台(来源:Science Robotics)
所有这些都可以通过使用非常简单的通信方式来实现,并且在位置感测或控制方面没有任何外部辅助,这成功验证了三维空间中隐式、自组织和分散协调的水下机器人集合的概念。
关于这项水下机器人成果的展望,研究人员表示,也将有助于实现机器人的无监督技能进化,从而有可能结合多种机器人模式(空中、地面、水面和水下),来实现可扩展且强大的冒险活动。
未来,这些机器人可以集体出动,去搜索失事飞机的残骸,落难船只和落水人员,以及应用到诸如环境监测、在珊瑚礁和沿海水域的搜索任务等。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢