
近日,来自德克萨斯大学阿灵顿分校(University of Texas at Arlington,UTA)的一个研究团队,提出了一种名为 PCGAN 的方法。据研究人员介绍,这是第一个以无监督方式生成 3D 点云(3D point cloud)的条件生成对抗网络(GAN),该网络能够产生具有多分辨率和精细细节的 3D 彩色点云,以生成利于辨别的物体图像,这将极有利于机器人视觉灵敏度的提升。如下图。
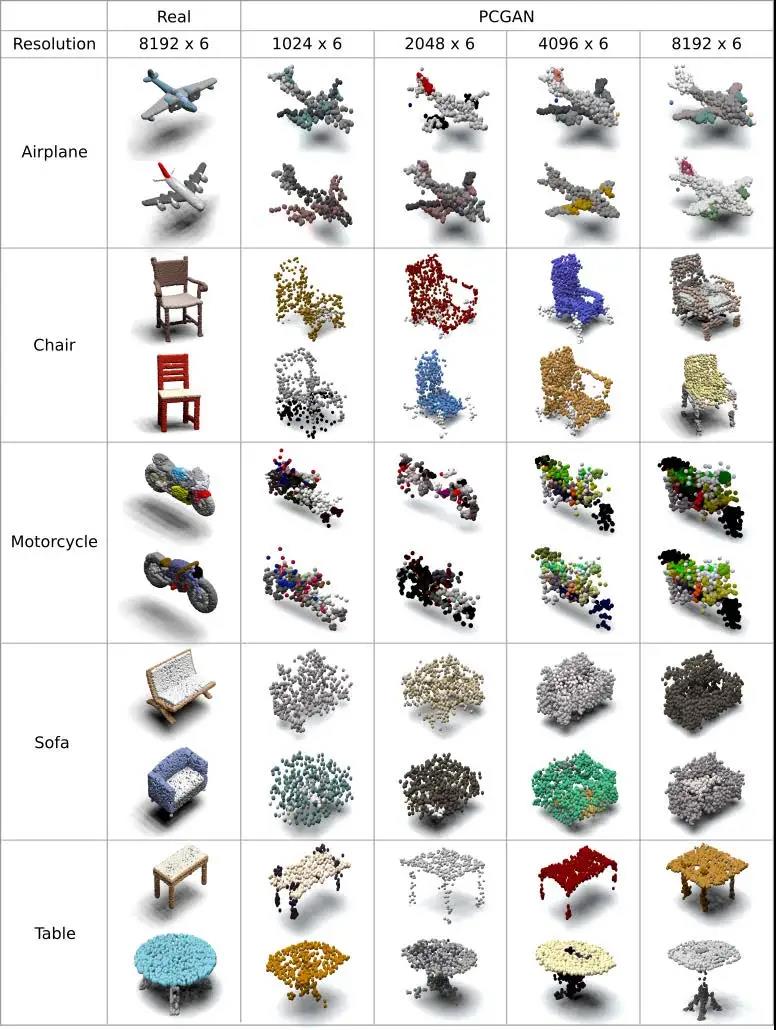 图注:real 列为真实物体的 3D 点云图像,后列为 PCGAN 产生的的结果
图注:real 列为真实物体的 3D 点云图像,后列为 PCGAN 产生的的结果
整个研究小组由 UTA 的计算机科学与工程学系助理教授 William Beksi和他的六名博士学生组成。参与这项研究的博士生 Mohammad Samiul Arshad 表示:“手动设计这些对象将耗费大量资源和人力,而如果进行适当的培训,生成网络就可以在几秒钟之内完成同样的任务。”
此次研究中的图像数据则通过 3D 点云呈现,这是一种透过 3D 扫描器所取得的物体图像形式,它以点的形式记录对象,每一个点包含有三维座标,强度信息(可以反映目标物体的材质、粗糙度、入射角方向等信息),还可能含有色彩信息(RGB)。
对此,Beksi 解释道:“我们可以将它们移动到新位置,甚至使用不同的灯光、颜色和纹理,将它们渲染为可在数据集中使用的训练图像。这种方法可能会提供无限的数据来训练机器人。”接下来,Beksi 团队希望将软件部署在机器人上,并查看它与模拟真实的领域之间还存在何种差距。
论文标题:A Progressive Conditional Generative Adversarial Network for Generating Dense and Colored 3D Point Clouds
论文地址:https://arxiv.org/abs/2010.05391
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢