
【论文标题】Learning Cross-Domain Correspondence for Control with Dynamics Cycle-Consistency
【作者团队】Qiang Zhang, Tete Xiao, Alexei A Efros, Lerrel Pinto, Xiaolong Wang
【发表时间】ICLR 2021
【论文链接】https://openreview.net/forum?id=QIRlze3I6hX
【推荐理由】本文提出一种适用于机器人控制领域的跨领域一致性控制模型,以直接将在一个领域训练的策略转移到另一个领域,而不需要对第二个领域进行任何额外的微调。提高了机器人手臂动作状态的精确度。
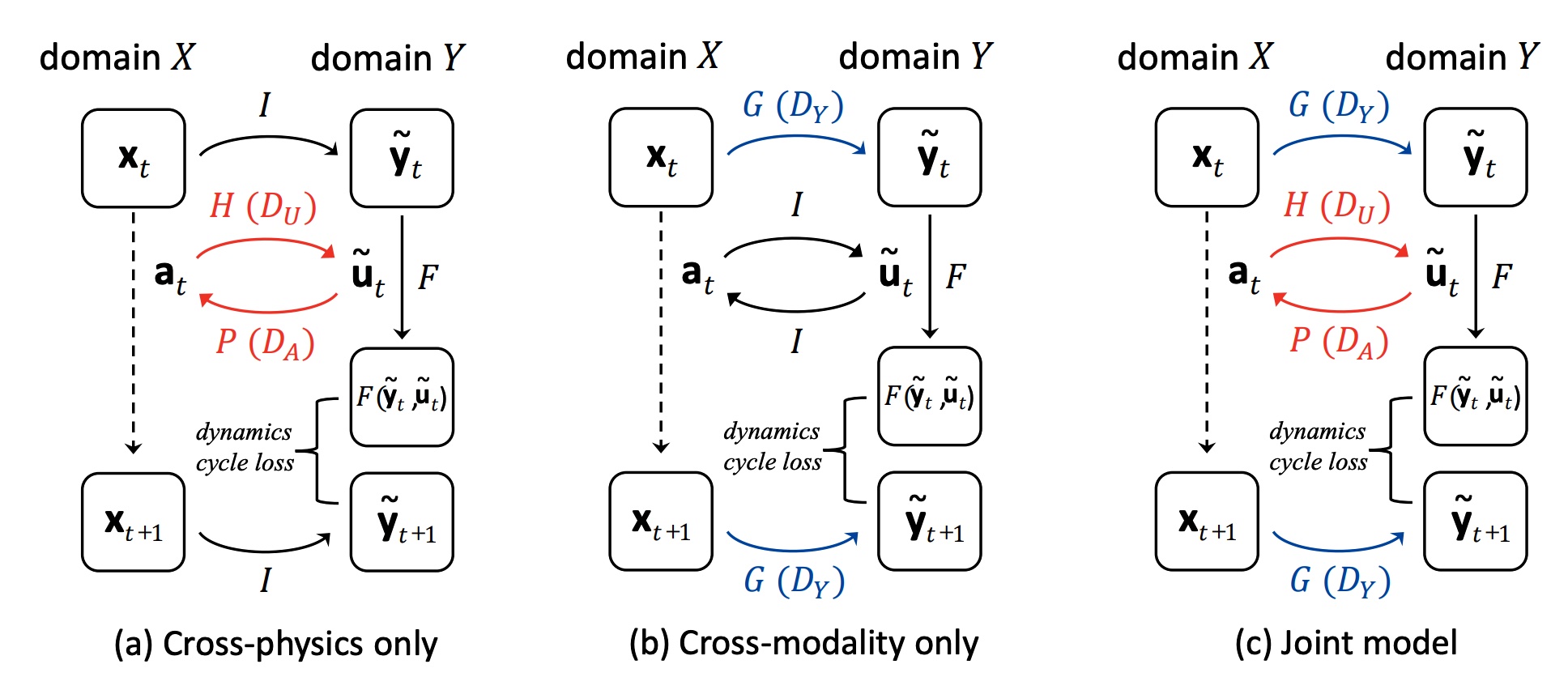 许多机器人问题的核心是跨领域学习通信的挑战。例如,模仿学习需要获得人与机器人之间的对应关系;模拟实景需要物理模拟器和实际硬件之间的通信;迁移学习要求不同机器人环境之间的相互适应。在这篇论文中,作者建议学习这些领域的对应,强调不同的形态(视觉和内部状态),物理参数(质量和摩擦),和形态(肢体的数量)。重要的是,通信学习使用未配对和随机收集的数据从两个领域。作者提出了一个动态循环,利用循环一致性约束使动态机器人的行为在两个域上一致。一旦找到了这种对应关系,然后就可以直接将在一个领域训练的策略转移到另一个领域,而不需要对第二个领域进行任何额外的微调。作者在模拟和真实的机器人上进行各种问题领域的实验。作者的框架能够在没有配对数据的情况下,将真实机器人手臂的未经校准的单目视频与模拟手臂的动态状态-动作轨迹校准。
许多机器人问题的核心是跨领域学习通信的挑战。例如,模仿学习需要获得人与机器人之间的对应关系;模拟实景需要物理模拟器和实际硬件之间的通信;迁移学习要求不同机器人环境之间的相互适应。在这篇论文中,作者建议学习这些领域的对应,强调不同的形态(视觉和内部状态),物理参数(质量和摩擦),和形态(肢体的数量)。重要的是,通信学习使用未配对和随机收集的数据从两个领域。作者提出了一个动态循环,利用循环一致性约束使动态机器人的行为在两个域上一致。一旦找到了这种对应关系,然后就可以直接将在一个领域训练的策略转移到另一个领域,而不需要对第二个领域进行任何额外的微调。作者在模拟和真实的机器人上进行各种问题领域的实验。作者的框架能够在没有配对数据的情况下,将真实机器人手臂的未经校准的单目视频与模拟手臂的动态状态-动作轨迹校准。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢