
论文标题:GDR-Net: Geometry-Guided Direct Regression Network for Monocular 6D Object Pose Estimation 论文链接:https://arxiv.org/abs/2102.12145 代码链接:https://github.com/THU-DA-6D-Pose-Group/GDR-Net.git 作者单位:清华大学 & 慕尼黑工业大学 & 谷歌 表现SOTA!性能优于PVNet、DeepIM等网络,代码即将开源!
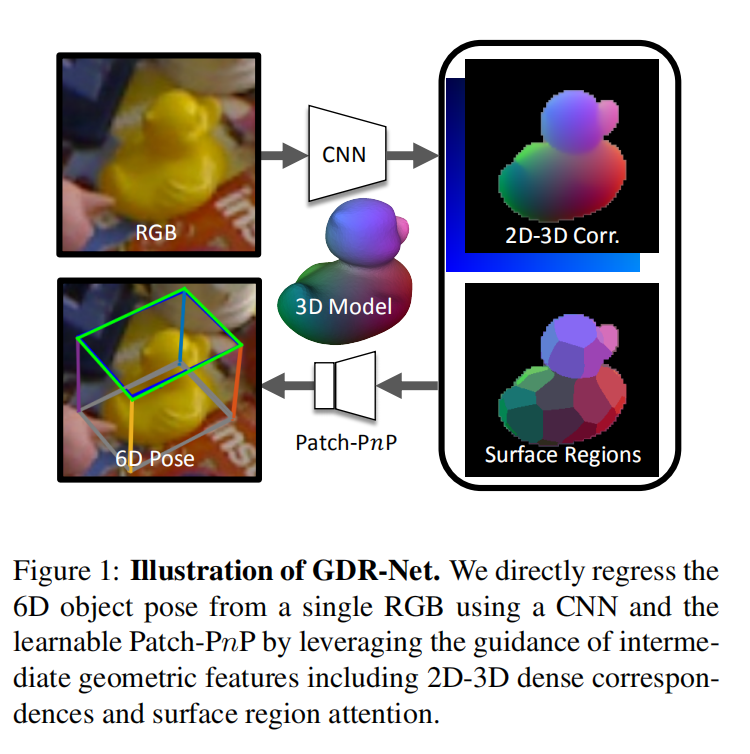
从单个RGB图像进行6D姿态估计是计算机视觉中的基本任务。当前基于表现最佳的深度学习方法依赖于间接策略,即首先在图像平面中的坐标与对象坐标系之间建立2D-3D对应关系,然后应用PnP / RANSAC算法的变体。但是,这种两阶段pipeline不是端到端可训练的,因此很难用于许多需要可区分姿势的任务。另一方面,基于直接回归的方法目前不如基于几何的方法。在这项工作中,我们对直接和间接方法进行了深入研究,并提出了一个简单而有效的几何引导直接回归网络(GDR-Net),以从密集模式以端到端的方式学习6D姿态。基于对应关系的中间几何表示。大量的实验表明,在LM,LM-O和YCB-V数据集上,我们的方法明显优于最新方法。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢