
论文名称:Learning Inverse Kinodynamics for Accurate High-Speed Off-Road Navigation on Unstructured Terrain
作者:Xuesu Xiao, Joydeep Biswas, Peter Stone
提交日期:2021.02.25
论文链接:https://arxiv.org/abs/2102.12667
推荐理由:
本文提出了一种基于学习的方法,考虑运动力学计划中不可观察的世界状态的影响,以便在非结构化地形上实现精确的高速越野导航。现有的运动动力学运动计划器或者在结构化且均质的环境中运行,无需明确考虑地形与车辆的交互作用,或者无需假设一组离散的地形类别。但是,在非结构化地形上操作时,尤其是在高速行驶时,即使环境中的微小变化也会被放大,导致计划执行的不准确。
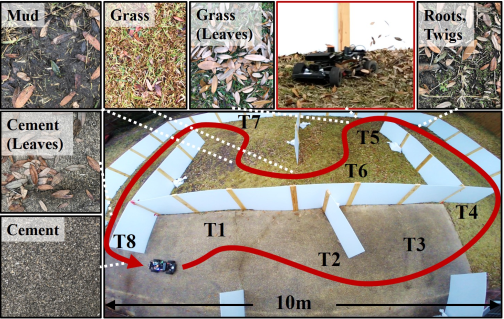 在本文中,为了捕获在不同的高速下由车辆-地形交互作用引起的难以捉摸和随机的世界状态,作者使用基于惯性的观察嵌入作为学习的逆运动学动力学函数的输入。该方法在物理机器人上以可见的和不可见的地形在不同的全球计划下以不同的速度进行了测试。实验结果表明,在不考虑世界状态的情况下,学习的模型可以明显胜过理想的基线模型。作者的消融研究还表明,作者的观测嵌入对于在非结构化地形上实现快速,准确的越野导航很有用。为了将来的工作。需要研究更好的地面真实性行驶性估计:除了单独的车轮里程计外,其他感知来源,例如: 视觉、点云和惯性。在本文中,为了捕获复杂的动力学模型和数学上未知的世界状态,作者以数据驱动的方式通过机载惯性观测学习了动力学设计器。此方法分别在不同室内和室外环境下进行了测试,最终可实现快速准确的越野导航,并且优于独立于环境的替代方案,在高速行驶时,计划执行成功率从52.4%提高至86.9% 。
在本文中,为了捕获在不同的高速下由车辆-地形交互作用引起的难以捉摸和随机的世界状态,作者使用基于惯性的观察嵌入作为学习的逆运动学动力学函数的输入。该方法在物理机器人上以可见的和不可见的地形在不同的全球计划下以不同的速度进行了测试。实验结果表明,在不考虑世界状态的情况下,学习的模型可以明显胜过理想的基线模型。作者的消融研究还表明,作者的观测嵌入对于在非结构化地形上实现快速,准确的越野导航很有用。为了将来的工作。需要研究更好的地面真实性行驶性估计:除了单独的车轮里程计外,其他感知来源,例如: 视觉、点云和惯性。在本文中,为了捕获复杂的动力学模型和数学上未知的世界状态,作者以数据驱动的方式通过机载惯性观测学习了动力学设计器。此方法分别在不同室内和室外环境下进行了测试,最终可实现快速准确的越野导航,并且优于独立于环境的替代方案,在高速行驶时,计划执行成功率从52.4%提高至86.9% 。
内容中包含的图片若涉及版权问题,请及时与我们联系删除


评论
沙发等你来抢