
论文标题:YOLOStereo3D: A Step Back to 2D for Efficient Stereo 3D Detection 论文链接:https://arxiv.org/abs/2103.09422 代码链接:https://github.com/Owen-Liuyuxuan/visualDet3D 作者单位:香港科技大学 & 中科院深圳先进技术研究院 表现SOTA!性能优于DSGN、Disp R-CNN等网络,代码现已开源!
使用立体相机进行3D目标检测是计算机视觉中的重要问题,在没有LiDAR的低成本自主移动机器人中尤为重要。如今,大多数用于立体3D对象检测的性能最佳的框架都是基于视差估计的密集深度重建,这使得它们在计算上极为昂贵。
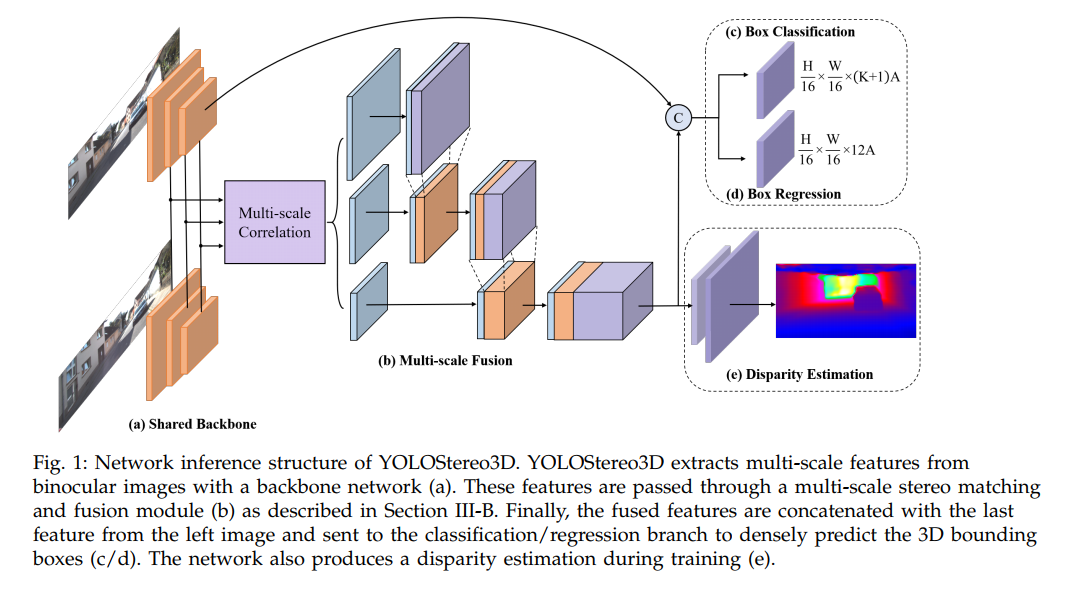
为了能够在现实世界中部署具有双目图像的视觉检测,我们要退后一步,从基于2D图像的检测框架中获得见解,并通过立体功能对其进行增强。 我们结合了实时一级2D / 3D对象检测器的知识和推理结构,并引入了轻量级立体声匹配模块。
我们提出的框架YOLOStereo3D在单个GPU上进行了训练,并以超过10 fps的速度运行。 它展示了与不使用LiDAR数据的最新立体声3D检测框架相媲美的性能。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢