
【标题】Decentralized Reinforcement Learning for Multi-Target Search and Detection by a Team of Drones
【作者团队】Roi Yehoshua, Juan Heredia-Juesas, Yushu Wu, Christopher Amato, Jose Martinez-Lorenzo
【研究机构】美国东北大学(波士顿)
【论文链接】论文链接
【发表时间】2021.3.17
【推荐理由】
本文来源于美国东北大学(波士顿),其提出了一种完全分散的多智能体策略梯度算法,强化学习方法(利用此模拟器进行训练)能够找到无人驾驶飞机的最佳策略,以解决现实世界中具有挑战性的多目标搜索和检测问题。
目标搜索和检测包含各种决策问题,如覆盖、监视、搜索、观察和追踪规避等。本文提出了一种多智能体深度强化学习(MADRL)方法来协调一组飞行器(无人机),以定位未知区域中的一组静态目标。为此,我们设计了一个逼真的无人机模拟器,该模拟器可复制真实实验的动力学和扰动,包括从实验数据中进行建模得出的统计推断。我们的强化学习方法(利用此模拟器进行训练)能够找到无人驾驶飞机的最佳策略。 与其他最新的MADRL方法相反,该方法在学习和执行期间都完全分散,可以处理高维和连续观察空间,并且不需要调整其他超参数。
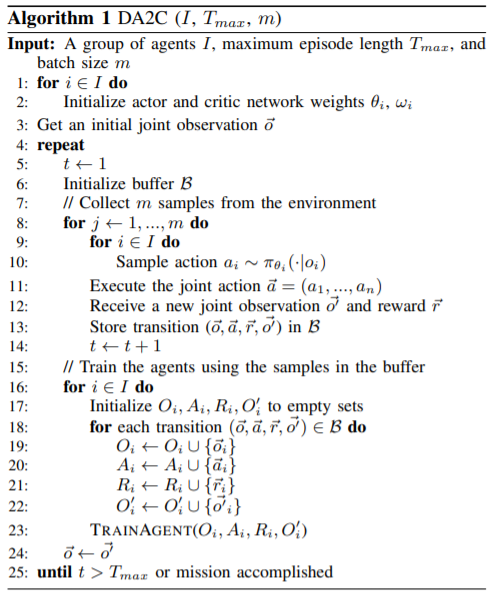 图1:Decenetralized Advantage Actor-Critic (DA2C)
图1:Decenetralized Advantage Actor-Critic (DA2C)
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢