
四足机器人由于其运动稳定性在人们日常生活中的应用越来越广泛,但是由于相关硬件和软件的制约,现有的机器人只能被束缚在一个固定的形态下工作,这种固定的形态使现有机器人不利于在复杂的环境中使用。
形态自适应机器人是一项很有前途的技术,它可以在工作状态下适应大量不可预测的环境和任务,而不需要在机器人每次遇到意外情况时再重新设计。
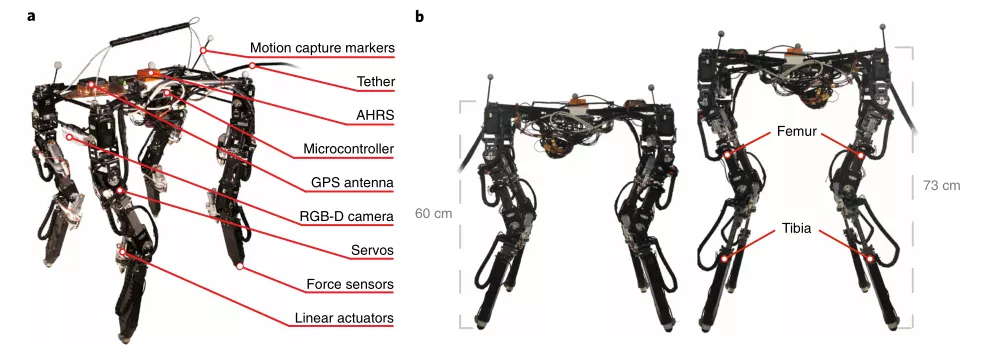
近日,来自奥斯陆大学(University of Oslo)信息学院的研究团队成功研制出了一种新型四足机器人,它不仅能够感知地形变换,同时还能根据地形变换自动改变形态。这也是人类历史上第一个功能齐全的形态自适应机器人。
相关论文以 “Real-world embodied AI through a morphologically adaptive quadruped robot” 为题,于 3 月 16 日发表在科学期刊 Nature 子刊《自然-机器智能》(Nature Machine Intelligence)上。
这种四足机器人形态适应功能是通过可变长度的腿提供的,它股骨和胫骨的长度可以在工作中得到调节,从而实现不同的行走方式。
同时,形态自适应机器人通过一种新的地形适应算法,使机器人的形态适应当前地形。这种算法通过知识引导,在线改变机器人的形态配置,以便在感知的地形特征时,通过变换形态从而优化能效。
该器人具有保持合理有效载荷的能力,并且在真实世界可以执行户外各种任务。同时,它还具有传感和驱动功能,可以在具有挑战性的现实环境中关闭体现大脑 - 身体 - 环境回路。此外,该研究有助于为灵活的硬件平台铺平道路,这些平台能够在室外等非结构化的地形中执行各种有用的任务。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢