
论文标题:Higher Performance Visual Tracking with Dual-Modal Localization 论文链接:https://arxiv.org/abs/2103.10089 作者单位:西工大 & 商汤 & 悉尼大学
追求鲁棒性和准确性之间的平衡,表现SOTA!性能优于Ocean、SiamRPN++等网络,
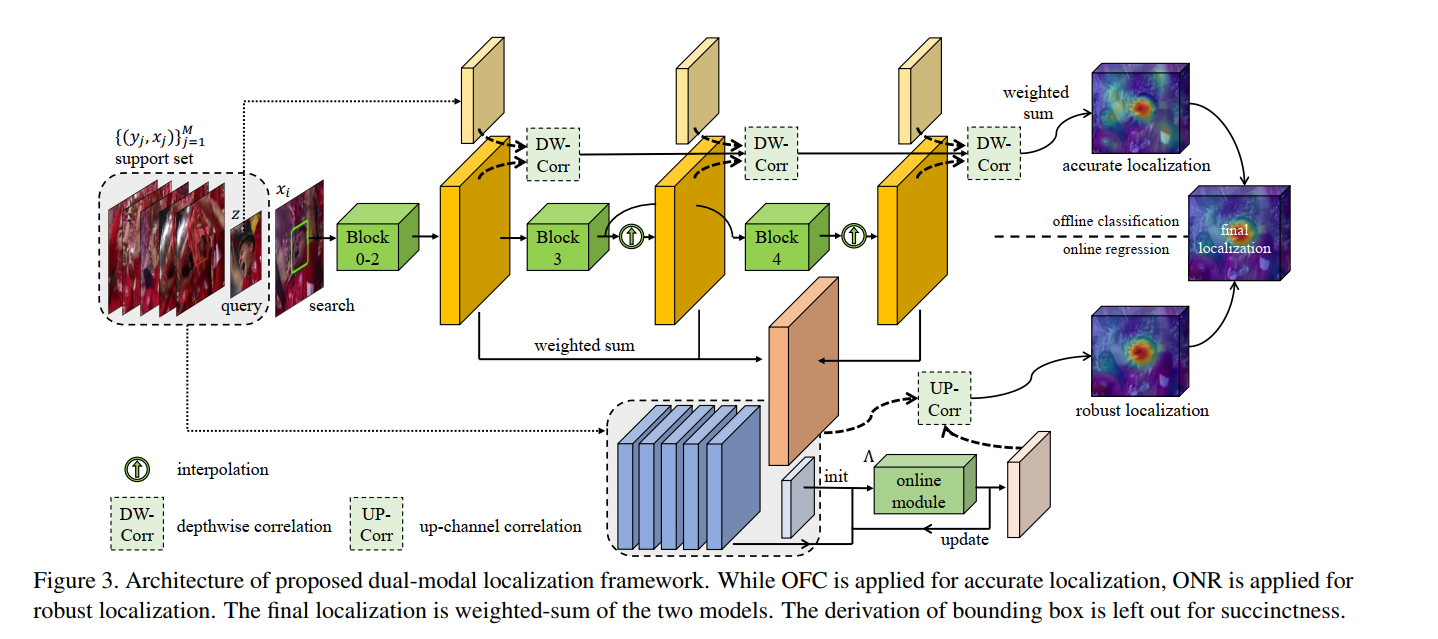
视觉目标跟踪(VOT)同步需要鲁棒性和准确性。尽管大多数现有工作无法同时在两者上运行,但我们在这项工作中调查了准确性与鲁棒性之间性能冲突的问题。我们首先对现有方法进行系统比较,然后从准确性和鲁棒性方面分析它们的局限性。具体来说,考虑了4种公式-离线分类(OFC),离线回归(OFR),在线分类(ONC)和在线回归(ONR)-根据在线更新的存在和监督信号的类型进行分类。为了解决这个问题,我们诉诸集成的想法,并提出了一种用于目标定位的双模态框架,该框架包括通过ONR进行鲁棒的定位抑制干扰因素以及通过OFC精确到达目标中心的精确定位。为了产生最终表示(即边界框),我们提出了一种简单但有效的分数投票策略,以涉及相邻的预测,以使最终表示不会提交到单个位置。除了实时需求外,我们提出的方法还通过8个数据集(VOT2018,VOT2019,OTB2015,NFS,UAV123,LaSOT,TrackingNet和GOT-10k)进行了验证,从而实现了最先进的性能。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢