

2021年3月19日
虚空射箭、隔空打字、智能点击,Facebook智能腕带实现全新「脑控」方式
Facebook 现实实验室近期向所有人秀了一把他们在 AR 交互领域取得的新成果:一款全新的腕带设备。
据研究者介绍,这款腕带设备开启了全新的动态控制,其中一项核心技术肌电描记术(EMG)发挥了重要作用,该技术可以将微妙的神经信号转化为一系列动作。具体而言,该腕带内置 EMG 感应器,用于接收从脊髓传输至手腕和手指的运动神经电信号,并转化为操控装置的数码指令。
在实现过程上,你向肌肉发送「活动手指」的控制指令,则指令首先从大脑发出,接着借助运动神经元传输通过脊柱,这是一种电信号。你必须抓住这种肌肉上的电信号,然后理解「活动手指」的指令,最终完成该动作。

Facebook 表示,新型手环设备已经实现了各种原型,通过不同的方法给用户微妙的反馈。一种原型是「Bellowband」,设有 8 个气动波纹管,可以控制波纹管中的空气,将其转译为有趣的压力和震动触觉反馈。另一种原型是「Tasbi」,即触碰和挤压手环介面( Tactile and Squeeze Bracelet Interface )的缩写。Tasbi 是以 6 个触觉致动器所组成,外加创新的手腕挤压机制。当它们与 AR 头戴设备的视觉反馈相结合时,它们可以通过一个简单直观的界面提供大量信息。
佩戴这款腕带,你还可以自由地移动光标。在这一过程中,你和腕带都接收和理解了神经元发出的向左或向右移动光标的指令,你和腕带处于实时交流中。这种新型的控制需要创建一个适应你自身和周围环境的界面。除此之外,这款腕带还支持触觉反馈,创建了一个响应能力比基础手势跟踪设备更强的系统。比如,虚空射箭:

Facebook 坚称,虽然 EMG 腕带能读取神经信号,但这与读心术不同。但 CTRL-Labs 仍然将这项技术描述为脑机接口,但它与埃隆 · 马斯克的 Neuralink 等技术形成了鲜明对比,后者通过植入物直接从大脑读取神经活动。植入物有独特的用途,特别是对于瘫痪或截肢的人,但他们的身体根本无法向腕带发送神经信号。
纳米机器人——世界上最小的折纸鸟,登上科学子刊封面
如果你想构建一个功能齐全的纳米级机器人,只需要将电子电路、传感器、天线等一系列元件进行整合;但如果您想让它动起来,就需要能够弯曲的材料。
康奈尔大学的研究团队创造出微米大小的形状记忆驱动器,只需提供快速震荡电压,就可使原子大小厚度的平面材料能够自行折叠成立体的3D 构造。并且,一旦材料弯曲,即使是去除电压也能持续保持形状。研究成果于3月17日以「用于低功率微型机器人的微米级电可编程形状记忆驱动器」(Micrometer-Sized Electrically Programmable Shape Memory Actuators for Low-Power Microrobotics)为题发表在《科学·机器人》(Science Robotics)杂志上,并登上了杂志封面。论文的主要作者是博士后研究员刘清坤和博士生王伟。
该团队研发出的纳米器件由一层纳米厚的铂薄膜组成,该薄膜在一侧被钝化层覆盖,通过对铂表面施加正向电压进行电化学氧化,使得氧化层中产生导致弯曲的应变。由于嵌入的氧原子会聚在一起形成势垒,阻止其扩散出去,该器件甚至可以在停止施加电压后仍能保持形状。
通过向设备施加负电压,研究人员可以去除氧原子,并迅速将铂还原为原始状态。通过改变面板的图案,以及铂是暴露在顶部还是底部,可以创建一系列折纸结构。
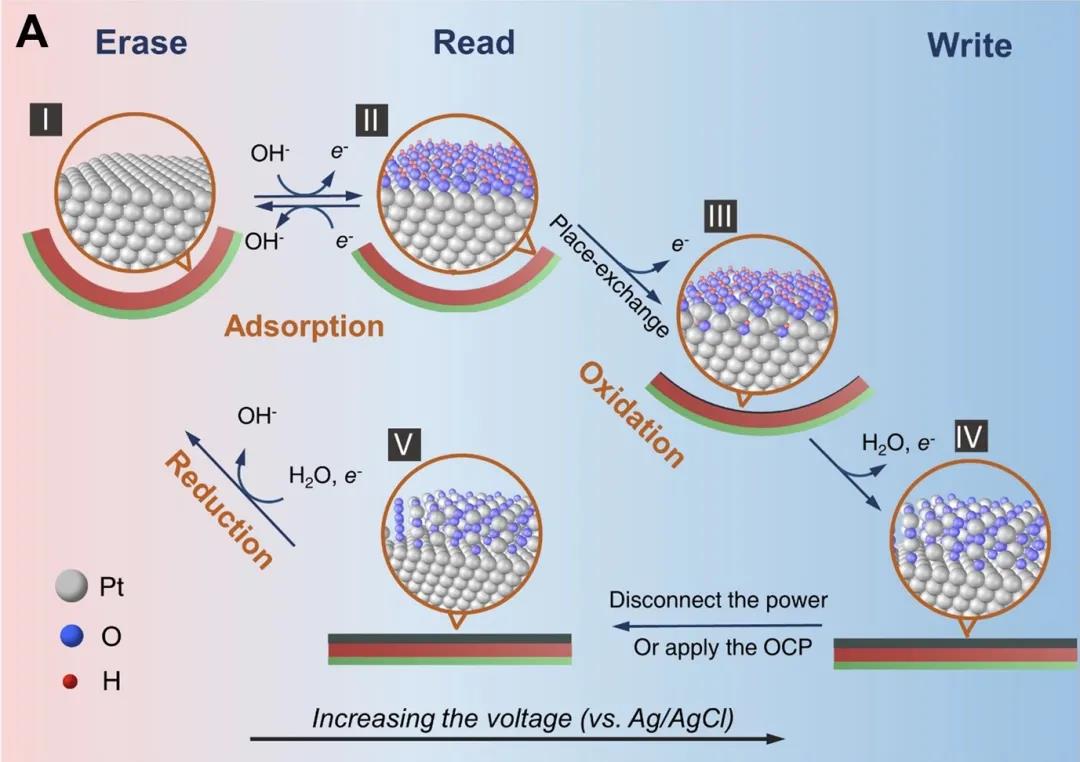 图示:电化学过程。(来源:论文)
图示:电化学过程。(来源:论文)
为了对研究成果进行演示,康奈尔大学研究团队还制造出了可能是世界上最小的自折叠折纸鸟。在此之前,他们发明的最小的行走机器人获得了吉尼斯世界纪录。现在,他们希望用这只仅有60微米宽的自折叠折纸鸟创造新的记录。
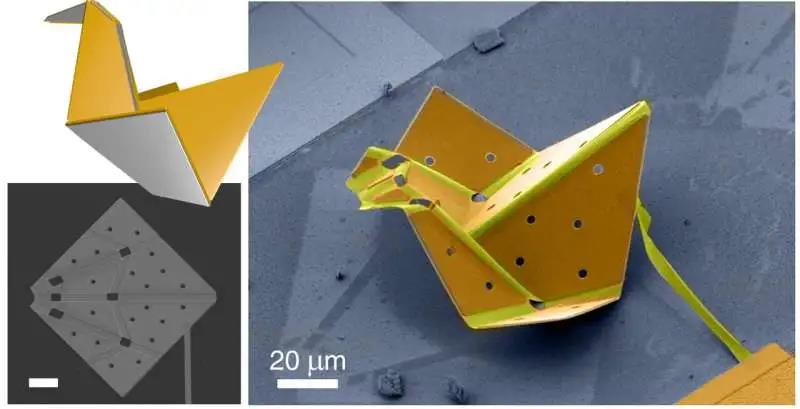 图示:自折叠折纸鸟。(来源:Science Robotics)
图示:自折叠折纸鸟。(来源:Science Robotics)
项目负责人之一、物理学教授McEuen认为:「我们作为人类的主要特征是,我们已经学会了如何在人类规模乃至更大规模上构建复杂的机器和系统,但是,我们还没有学会如何在微小规模上建造机器。学习如何构造像细胞一样小的机器,是人类可以做到的根本性发展的一步。」
史上首个功能齐全的形态自适应机器人问世!与AI完美结合,可根据地形自动变化形态
四足机器人由于其运动稳定性在人们日常生活中的应用越来越广泛,但是由于相关硬件和软件的制约,现有的机器人只能被束缚在一个固定的形态下工作,这种固定的形态使现有机器人不利于在复杂的环境中使用。
形态自适应机器人是一项很有前途的技术,它可以在工作状态下适应大量不可预测的环境和任务,而不需要在机器人每次遇到意外情况时再重新设计。
近日,来自奥斯陆大学(University of Oslo)信息学院的研究团队成功研制出了一种新型四足机器人,它不仅能够感知地形变换,同时还能根据地形变换自动改变形态。这也是人类历史上第一个功能齐全的形态自适应机器人。
相关论文以 “Real-world embodied AI through a morphologically adaptive quadruped robot” 为题,于 3 月 16 日发表在科学期刊 Nature 子刊《自然-机器智能》(Nature Machine Intelligence)上。
自动驾驶公司Momenta获C轮5亿美元融资
3月19日,自动驾驶公司Momenta宣布,已完成C轮总计5亿美元融资。此轮融资由上汽集团、丰田、博世、淡马锡和云锋基金领投;其他投资方还包括梅赛德斯-奔驰、GGV纪源资本、顺为资本、腾讯和凯辉基金等。
Momenta方面称,获得新融资后,Momenta将继续围绕其量产数据驱动的“飞轮”技术路线,推动自动驾驶的规模化落地上。此外,Momenta还将进一步扩展海外业务,在德国、日本设立办公室。
Momenta成立于2016年9月,致力于打造自动驾驶大脑,核心技术是基于深度学习的环境感知、高精度地图、驾驶决策算法。Momenta号称围绕“飞轮”和“两条腿”的产品战略。“飞轮”是指其“量产数据+数据驱动的算法+闭环自动化”的飞轮式技术路线;“两条腿”是指高速和泊车产品Mpilot和L4无人驾驶技术MSD(Momenta Self Driving)。该战略的运作模式主要是利用和车企合作前装量产的Mpilot不断上传的数据,结合Momenta的自我进化的数据驱动算法,从而不断提升MSD能力。
Momenta称,随着飞轮的转动,Momenta实现完全无人驾驶的速度得到了显著提升。该公司表示,目前已在环境感知、高精地图、预测等环节已实现了数据驱动,并通过闭环自动化持续迭代升级。根据规划,预计到2022年,该公司可实现全流程数据驱动的算法,并计划在2023年利用闭环自动化实现算法100%自动迭代。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢