
【标题】Integrated Decision and Control: Towards Interpretable and Efficient Driving Intelligence
【作者团队】Yang Guan, Yangang Ren, Shengbo Eben Li, Haitong Ma, Jingliang Duan, Bo Cheng
【研究机构】清华大学
【发表时间】2021.3.18
【论文链接】原文链接
【推荐理由】本文来源于清华大学李升波教授研究团队,其提出了一个可解释且有效的自动驾驶车辆决策和控制框架,该框架具有较高的在线计算效率和在不同的驾驶任务之间具有很好的可解释性和适应性。
决策和控制是高级自动驾驶的两个核心功能。当前的主流方法,例如功能分解或端到端强化学习(RL),在现实世界中复杂的自动驾驶任务中要么时间复杂度高,解释性差,要么安全性能有限。本文提出了一个可解释且有效的自动驾驶车辆决策和控制框架,该框架将驾驶任务分解为分层结构的多路径规划和最优跟踪。首先,多路径规划是仅考虑静态约束来生成多条路径。然后,在考虑动态障碍的同时,设计最佳跟踪以跟踪最佳路径。为此,从理论上讲,我们为每条候选路径制定一个约束最优控制问题(OCP),分别对其进行优化,然后选择要跟踪的最佳跟踪性能。更重要的是,我们提出了一种基于模型的强化学习(RL)算法,该算法用作近似约束的OCP求解器,通过离线训练和在线应用的范式来卸载繁重的计算。具体来说,将所有路径的OCP一起考虑以构造多任务RL问题,然后通过我们的算法将其离线求解为价值和策略网络,分别用于实时在线路径选择和跟踪。我们在模拟和现实世界中都验证了我们的框架。结果表明,与基线方法相比,该方法具有更好的在线计算效率和驾驶性能,包括交通效率和安全性。此外,它在不同的驾驶任务之间也具有很好的可解释性和适应性。真实的道路测试还表明,它无需调整即可适用于复杂的交通场景。
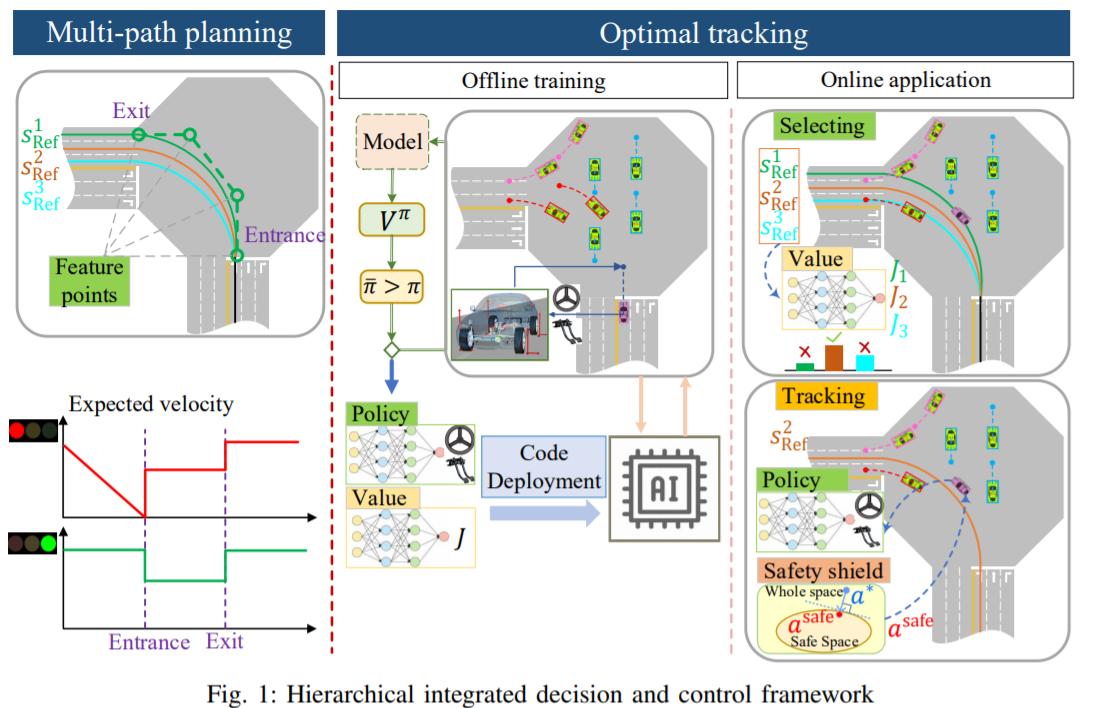 图1:层次集成决策与控制网络框架
图1:层次集成决策与控制网络框架
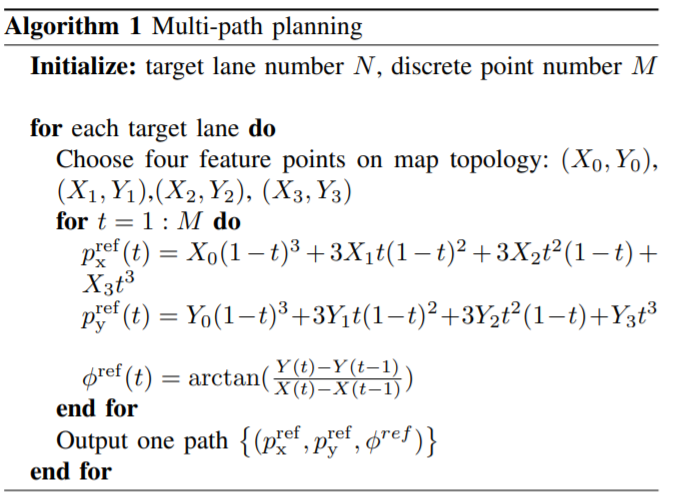 图2:多路径规划算法
图2:多路径规划算法
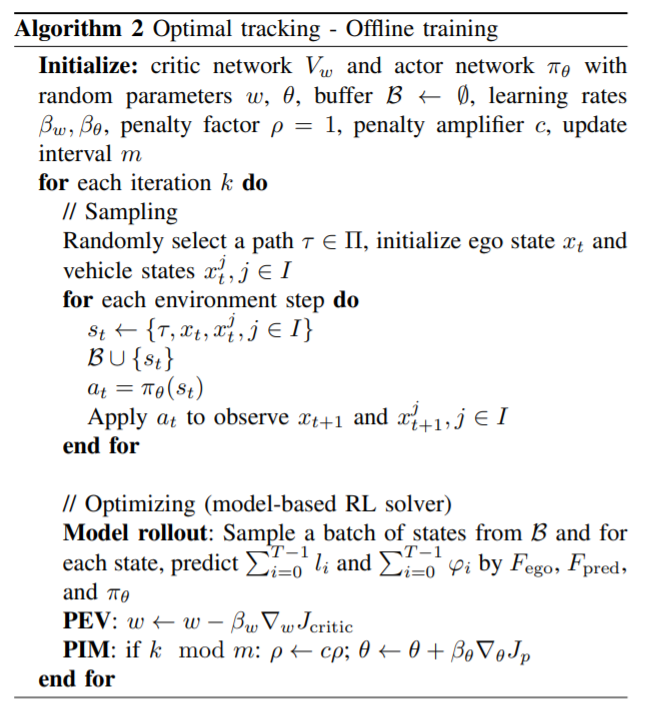 图3:最优跟踪离线应用
图3:最优跟踪离线应用
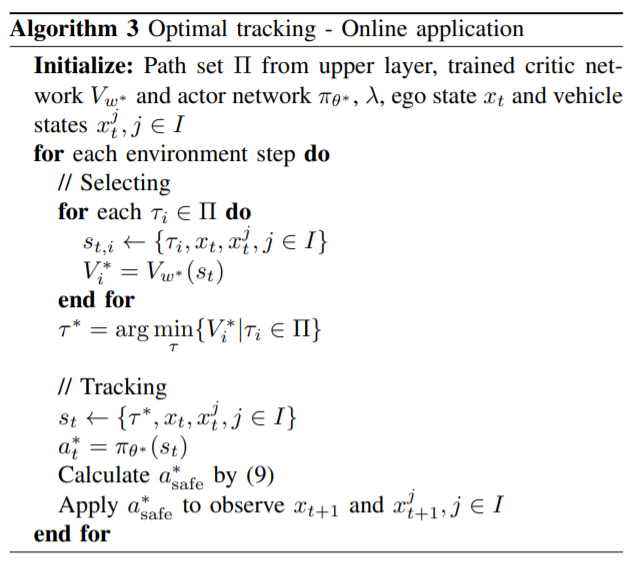 图4:最优跟踪在线应用
图4:最优跟踪在线应用
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢