
【新智元导读】人类能够模仿别人的行为,根据给定的目标来规划自己的行动。DeepMind最近发布了一个新模型,赋予机器人相同的能力,最终生成的模型与操作器、任务都无关,具有更好地通用性。
人类是擅于模仿的,我们和其他动物通过观察行为来模仿,理解它对环境状态的感知影响,并找出我们的身体可以采取什么行动来达到类似的结果。
对于机器人学习任务来说,模仿学习是一个强大的工具。但在这类环境感知任务中,使用强化学习来指定一个回报函数却是很困难的。
DeepMind最新论文主要探索了仅从第三人称视觉模仿操作轨迹的可能性,而不依赖action状态,团队的灵感来自于一个机器人机械手模仿视觉上演示的复杂的行为。
 DeepMind提出的方法主要分为两个阶段:
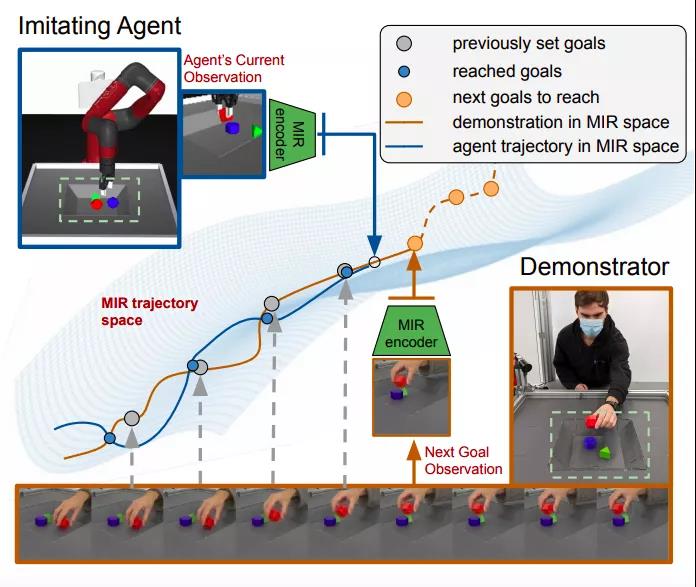
1、提出一种操作器无关的表示(MIR, Manipulation-Independent Representations),即不管是机械手、人手或是其他设备,保证这种表示都能够用于后续任务的学习
2、使用强化学习来学习action策略
DeepMind提出的方法主要分为两个阶段:
1、提出一种操作器无关的表示(MIR, Manipulation-Independent Representations),即不管是机械手、人手或是其他设备,保证这种表示都能够用于后续任务的学习
2、使用强化学习来学习action策略
这项研究论证了视觉模仿表征在视觉模仿中的重要性,并验证了操作无关表征在视觉模仿中的成功应用。 未来工厂中的机器人将拥有更强大的学习能力,并不局限于一种特定工具,一种特定任务。 论文链接
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢