
【标题】Spatial Intention Maps for Multi-Agent Mobile Manipulation 【作者团队】Jimmy Wu, Xingyuan Sun, Andy Zeng, Shuran Song, Szymon Rusinkiewicz, Thomas Funkhouser 【研究机构】普林斯顿大学 【发表时间】2021.3.23 【论文链接】原文链接 【代码链接】代码链接 【推荐理由】本文提出了空间意图映射框架,以改善多智能体RL的协作。在该框架中,意图被空间编码在2D地图中,允许基于视觉的RL代理在空间上推理与状态和动作相同的领域中的意图。其帮助机器人团队学习紧急协作行为,如避免碰撞、协调通过瓶颈和以及在整个环境中分布。
传达意图的能力使分散的多智能体机器人能够在执行物理任务的同时进行协作。本文提出了空间意图图,其为新的基于多智能体视觉的深度强化学习的意图表示,它可以改善分散式移动操纵器之间的协调性。在此表示中,每个代理的意图被提供给其他代理,并被渲染成与视觉观察对齐的高架2D地图。这与最近提出的空间动作图框架相结合,在该框架中,状态和动作表示在空间上是对齐的,提供l归纳性偏差,鼓励需要空间协调的紧急合作行为,例如相互传递对象或避免碰撞。在各种多智能体环境中的实验,包括具有不同能力(提升、推动或投掷)的异构机器人团队,表明结合空间意图图提高了不同移动操作任务的性能,同时显著增强了合作行为。
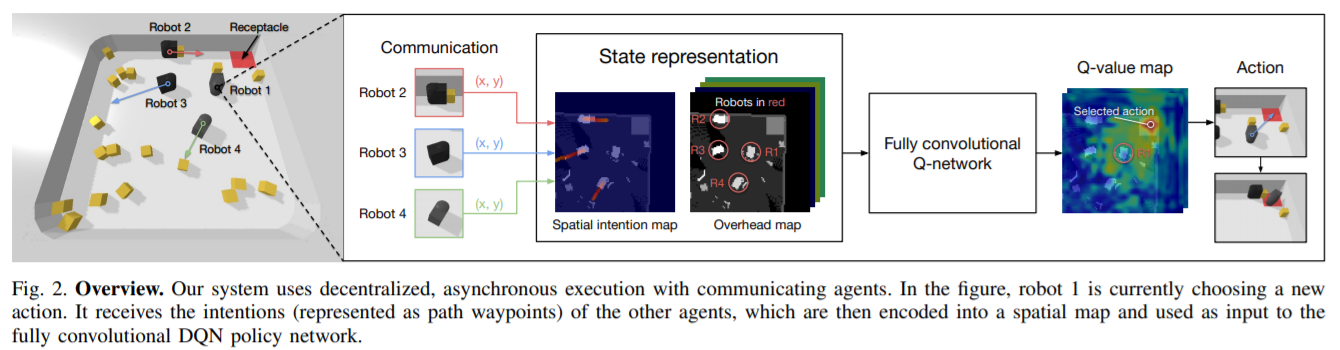 图1:spatial-intention-maps架构
图1:spatial-intention-maps架构
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢