
论文标题:AgentFormer: Agent-Aware Transformers for Socio-Temporal Multi-Agent Forecasting 论文链接:https://arxiv.org/abs/2103.14023 代码链接:https://github.com/Khrylx/AgentFormer 作者单位:卡内基梅隆大学 & 宾夕法尼亚大学
可以同时对时间和社会维度进行联合建模,表现SOTA!性能优于Trajectron++、PECNet等网络。
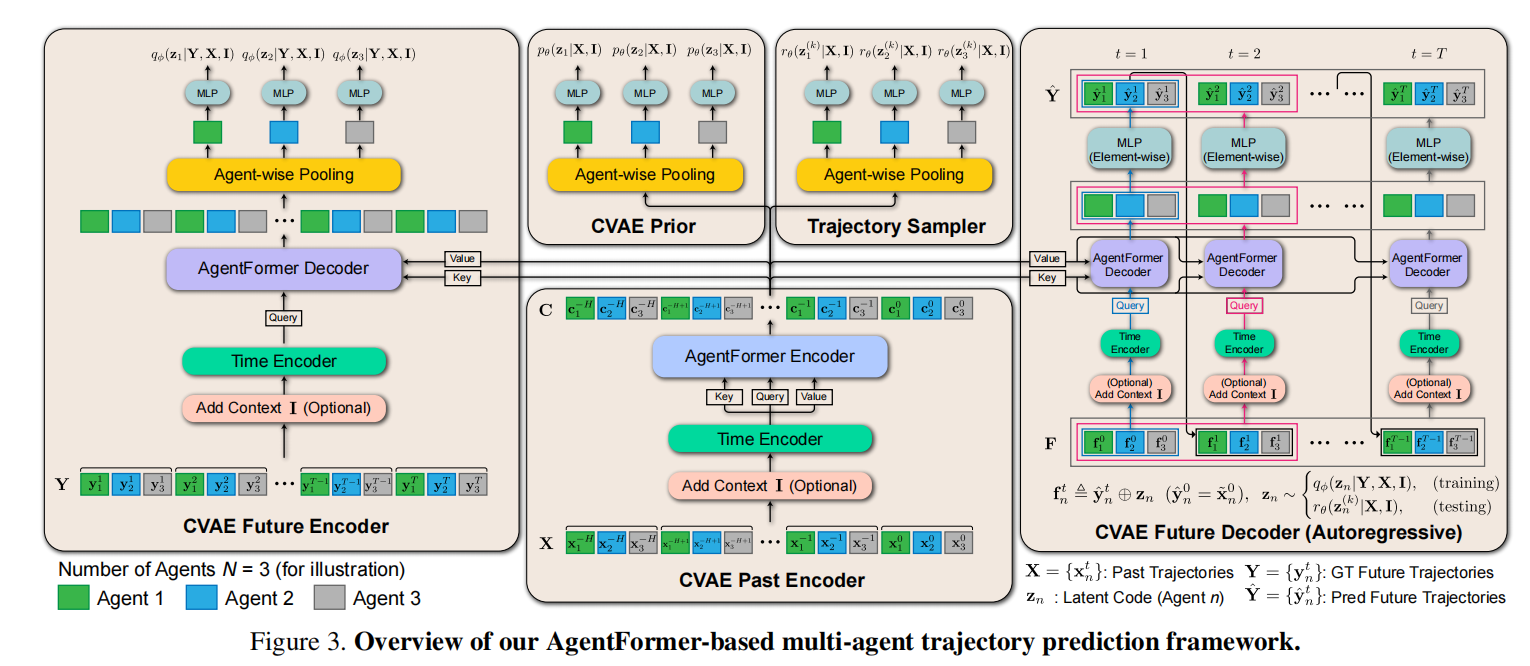
预测多个agents的准确未来轨迹对于自治系统至关重要,但是由于复杂的agents交互以及每个agent的未来行为的不确定性,这具有挑战性。预测多agents轨迹需要建模两个关键维度:(1)时间维度,其中我们建模过去主体状态对未来状态的影响; (2)社会维度,我们在其中建模每个主体的状态如何影响他人。大多数现有方法分别为这两个维度建模。例如,首先使用时间模型为每个代理独立地随时间总结特征,然后对摘要特征与社交模型的交互进行建模。由于在时间或社交维度上进行独立的特征编码可能会导致信息丢失,因此该方法不是最佳的。取而代之的是,我们希望使用一种方法,该方法允许一个代理的状态一次在将来的某个时间直接影响另一个代理的状态。为此,我们提出了一个新的Transformer:AgentFormer,它可以对时间和社会维度进行联合建模。该模型通过展平时间和主体之间的轨迹特征来利用多主体轨迹的序列表示。由于标准注意操作忽略了序列中每个元素的代理身份,因此AgentFormer使用一种新颖的代理感知注意机制,该机制通过关注同一代理的元素与其他代理的元素不同来保留代理身份。基于AgentFormer,我们提出了一种随机的多Agent轨迹预测模型,该模型可以在推断Agent的未来位置时在任何先前的时间步上关注任何Agent的特征。还对所有主体的潜在意图进行了联合建模,从而使一个主体行为的随机性影响了其他主体。我们的方法极大地改善了行之有效的行人和自动驾驶数据集的技术水平。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢