
论文标题:FS-Net: Fast Shape-based Network for Category-Level 6D Object Pose Estimation with Decoupled Rotation Mechanism 论文链接:https://arxiv.org/abs/2103.07054 代码链接:https://github.com/DC1991/FS-Net 作者单位:伯明翰大学 & 深圳大学
表现SOTA!性能优于PVN3D、G2L-Net等网络,速度可达20 FPS!代码即将开源!
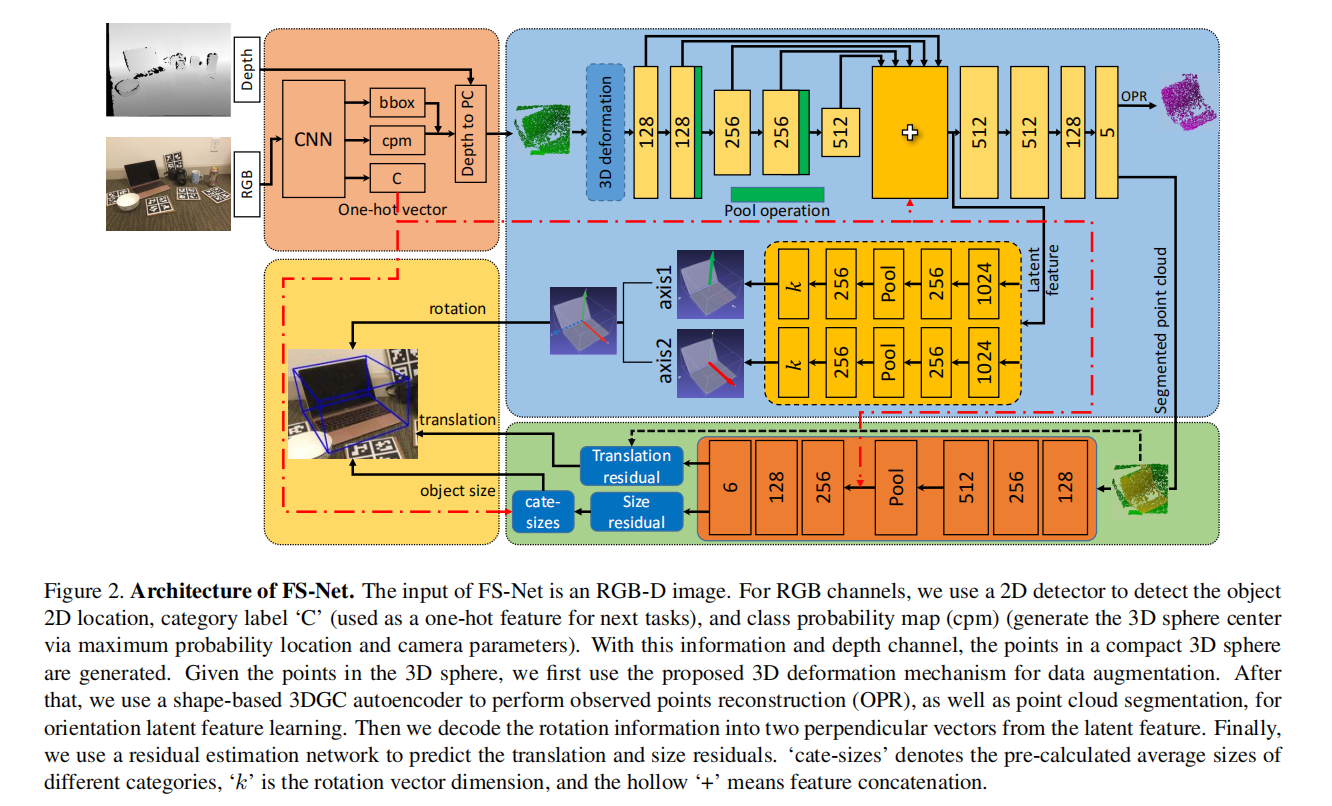
在本文中,我们专注于单目RGB-D图像的类别级6D姿态和大小估计。先前的方法遭受低效率的类别级姿态特征提取,这导致低准确性和推断速度。为了解决这个问题,我们提出了一种基于快速形状的网络(FS-Net),该网络具有用于6D姿态估计的有效类别级特征提取。首先,我们设计了具有3D图形卷积的定向感知自动编码器,用于潜在特征提取。得益于3D图形卷积的平移和缩放不变性,学习到的潜在特征对点平移和对象大小不敏感。然后,为了有效地从潜在特征中解码类别级别的旋转信息,我们提出了一种新颖的解耦旋转机制,该机制使用两个解码器来互补地访问旋转信息。同时,我们通过两个残差来估计平移和大小,这两个残差分别是对象点的均值和地面实况平移之间的差,以及类别的平均大小和ground truth大小之间的差。最后,为了提高FS-Net的泛化能力,我们提出了一种基于在线框笼的3D变形机制,以增强训练数据。在两个基准数据集上进行的大量实验表明,该方法在类别和实例级别的6D物体姿态估计中均达到了最新的性能。特别是在类别级别的姿态估计中,没有额外的合成数据,在NOCS-REAL数据集上,我们的方法比现有方法的性能高6.3%。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢