
【论文标题】Group-Free 3D Object Detection via Transformers 【作者团队】Ze Liu, Zheng Zhang, Yue Cao, Han Hu, Xin Tong 【机构】中科大,微软亚洲研究院 【发表时间】2021/4/1 【论文链接】https://arxiv.org/pdf/2104.00678.pdf
【推荐理由】 本文针对3D点云目标检测任务中,现有将点云分配给候选对象的方法需要手工分组,容易引起点分配不正确的问题,提出了基于Transformer的无需分组3D目标检测方法。 作者提出了一种简单而有效的方法,用于直接从3D点云中检测3D目标。通过借助Transformer中的注意力机制从点云中的所有点计算目标的特征,每个点的增益都可以在Transformer的学习网络中自动训练。通过改进的注意力叠加方案,模型在不同阶段融合了目标特征,并生成了更准确的目标检测结果。模型的结构示意图如图1所示,包括三个主要组件:骨干网络,用于提取点云中每个点的特征表示;采样方法,用于生成初始对象候选;以及堆叠式关注模块,用于从各个点中优化目标表示。在实验部分,文章所提方法在scannetv2和sunrgb-D基准上取得了最新的性能结果。
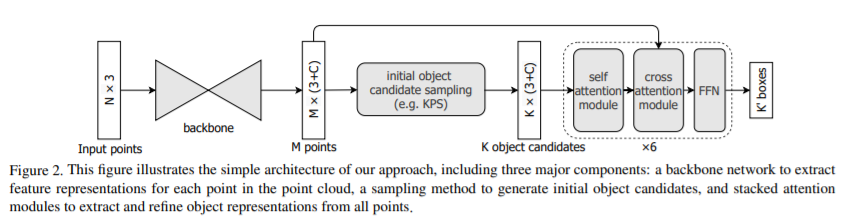 图1: 模型结构示意图
图1: 模型结构示意图
内容中包含的图片若涉及版权问题,请及时与我们联系删除
沙发等你来抢
去评论

评论
沙发等你来抢