
【标题】A Bayesian Approach to Reinforcement Learning of Vision-Based Vehicular Control 【作者】Zahra Gharaee, Karl Holmquist, Linbo He, Michael Felsberg 【研究团队】University of Linkoping 【发表时间】2021.4.8 论文链接 【推荐理由】本文提出了用于最先进的自动驾驶性能强化学习方法。该方法同时基于代理执行的动作对代理的感知空间进行聚类。且该学习算法是基于概率贝叶斯模型开发的,使代理能够理解噪音环境中的动作概率。研究结果表明,该方法提高了训练的鲁棒性以及测试性能。
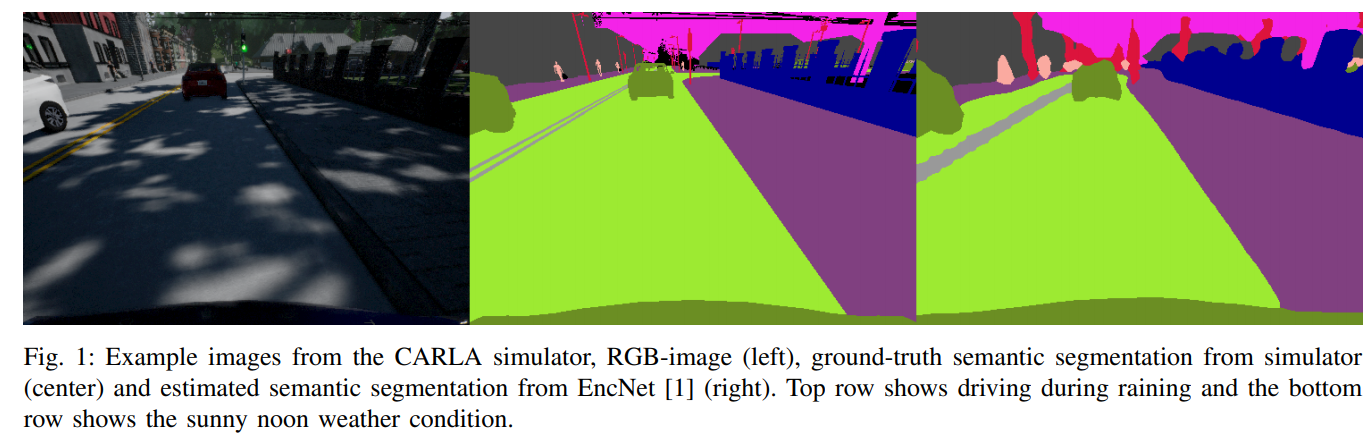
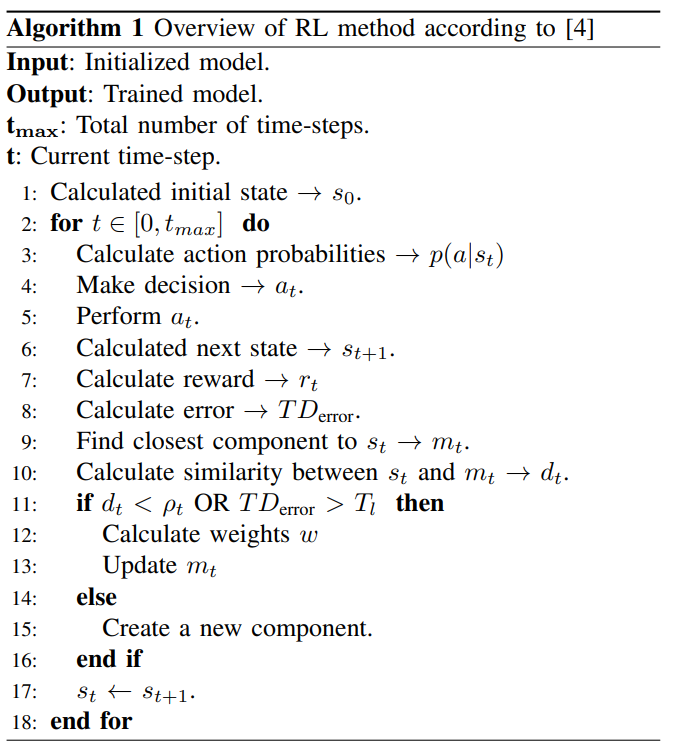
本文提出了一种用于自动驾驶的最先进的强化学习方法。该方法在贝叶斯框架中采用时差学习,以从传感器数据中学习车辆控制信号。代理可以访问来自前置摄像头的图像,这些图像经过预处理以生成语义分割图。并且使用地面实况和估计的语义细分输入来训练本文的系统。实验研究表明,即使使用估计输入进行评估,基于真实输入数据训练系统也比基于估计输入训练系统具有更好的性能。使用CARLA模拟器在真实的模拟城市环境中训练和评估该系统。模拟器还包含一个基准,允许与其他系统和方法进行比较。该系统所需的训练时间较低,基准测试的性能优于竞争方法。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢