
论文标题:HVPR: Hybrid Voxel-Point Representation for Single-stage 3D Object Detection 论文链接:https://arxiv.org/abs/2104.00902 主页链接:https://cvlab.yonsei.ac.kr/projects/HVPR/ 作者单位:延世大学
融合了基于Voxel和基于Point的特征的优点,表现SOTA!性能优于Associate-3D、TANet等网络,速度高达36 FPS!代码即将开源!
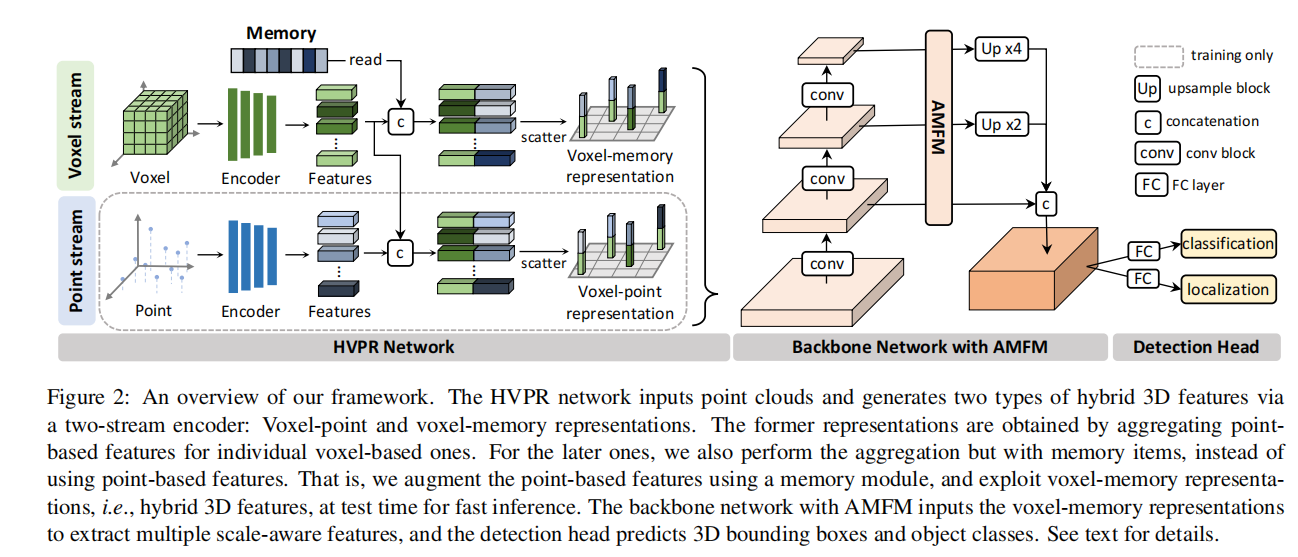
我们解决了3D目标检测的问题,即从点云估计3D物体边界框。 3D目标检测方法利用基于voxel或基于点的特征来表示场景中的3D对象。基于voxel的特征虽然无法保留对象的细粒度3D结构,但提取效率很高。另一方面,基于点的特征可以更准确地表示3D结构,但是提取这些特征的计算量很大。我们在本文中介绍了一种新颖的单阶段3D检测方法,该方法具有基于voxel和基于point的特征的优点。为此,我们提出了一种新的卷积神经网络(CNN)架构,称为HVPR,该架构将这两个特征有效且高效地集成到单个3D表示中。具体来说,我们使用memory模块扩展了基于点的特征,从而降低了计算成本。然后,我们将这些特征聚合到memory中,在语义上类似于每个基于voxel的特征,以获得伪图像形式的混合3D表示,从而可以在单个阶段中有效地定位3D对象。我们还提出了一种注意多尺度特征模块(AMFM),该模型考虑点云的稀疏和不规则模式来提取尺度感知特征。 KITTI数据集上的实验结果证明了我们方法的有效性和效率,在速度和准确性方面取得了更好的折衷。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢