
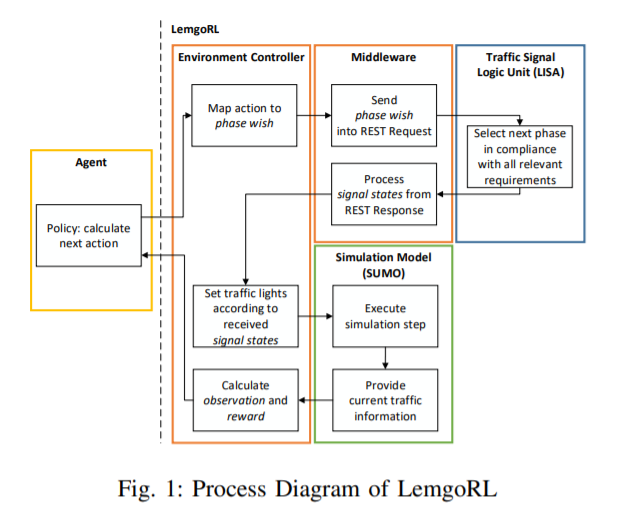
【标题】LemgoRL: An open-source Benchmark Tool to Train Reinforcement Learning Agents for Traffic Signal Control in a real-world simulation scenario 【论文链接】https://arxiv.org/pdf/2103.16223.pdf 【参考链接】https://github.com/rl-ina/lemgorl 【作者团队】Arthur Müller, Vishal Rangras, Georg Schnittker, Michael Waldmann, Maxim Friesen, Tobias Ferfers, Lukas Schreckenberg, Florian Hufen, Jürgen Jasperneite, Marco Wiering 【发表时间】2021.3.30 【推荐理由】本文介绍了LemgoRL,其为一个开源基准测试工具,可以在真实的仿真环境中将RL代理训练为TSC。 该工具可推动RL算法的发展,以实现实际部署中的交通信号控制。
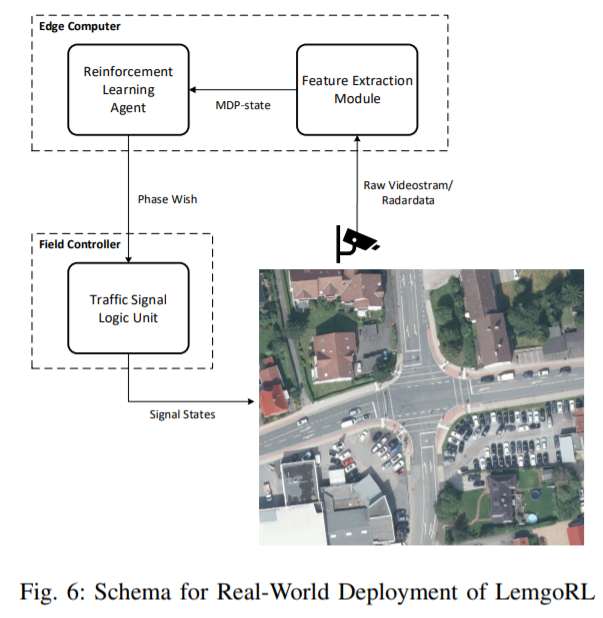
交叉路口交通信号控制器(TSC)中的次优控制策略加剧了交通拥堵,并对人类健康和环境造成负面影响。交通信号控制中的强化学习是一种很有前途的设计更好的控制策略的方法,近年来引起了广泛的研究兴趣。然而,在该领域中完成的大多数工作都使用简化的交通场景模拟环境来训练基于RL的TSC。为了在实际交通系统中部署RL,必须缩小简化的仿真环境与实际应用之间的差距。因此,本文提出了LemgoRL这种基准工具,用于在德国一个中等规模的城镇Lemgo的真实模拟环境中,将RL代理训练为TSC。除了真实的模拟模型,LemgoRL还包含了交通信号逻辑单元,确保符合所有法规和安全要求。LemgoRL提供了与众所周知的OpenAI Gym工具包相同的界面,以便在现有的研究工作中轻松部署。本文提出的基准工具推动了RL算法向现实世界应用的发展。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢