【标题】Towards Deployment of Deep-Reinforcement-Learning-Based Obstacle Avoidance into Conventional Autonomous Navigation Systems
【作者团队】Linh Kästner, Teham Buiyan, Xinlin Zhao, Lei Jiao, Zhengcheng Shen, Jens Lambrecht
【论文链接】https://arxiv.org/pdf/2104.03616.pdf
【DEMO链接】https://github.com/ignc-research/arena-rosnav
【发表时间】2021.4.8
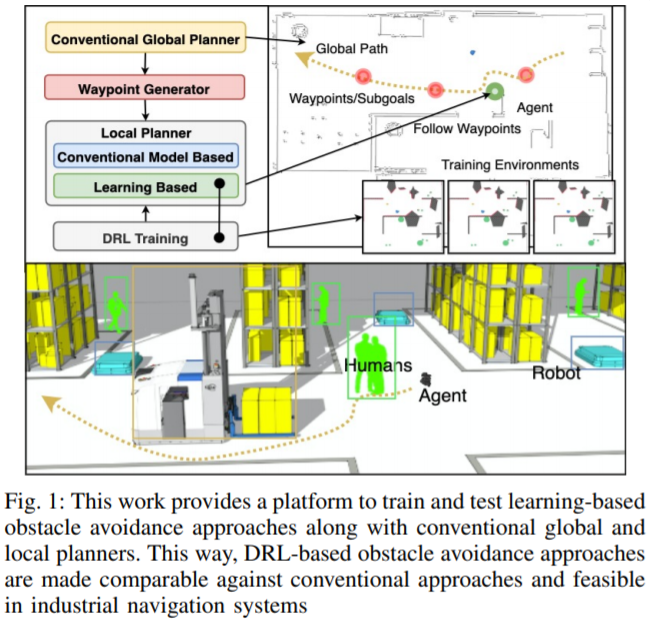
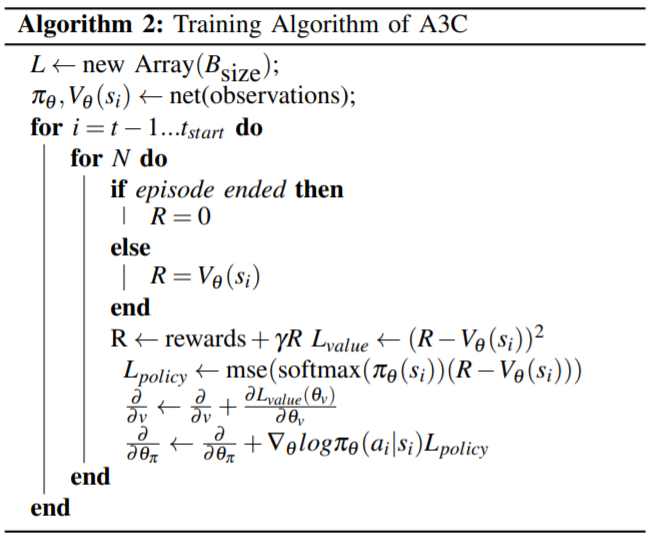
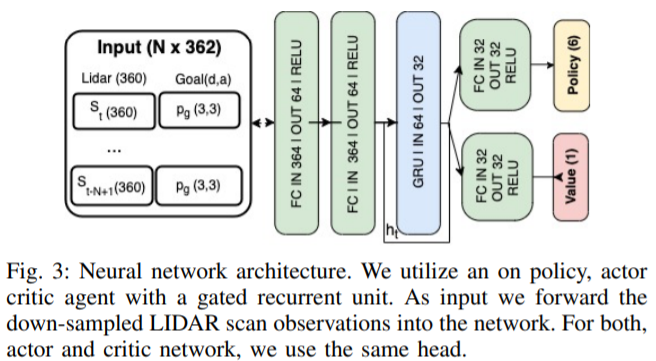
【推荐理由】本文提出了一个将DRL局部规划器融入远程导航的框架,其将局部规划器与经典的全局规划器相结合。此外,将各种传统的基于模型和基于学习的避障算法集成到本文的系统中,以提出一种基于DRL的使用记忆增强A3C的局部规划器。研究结果表明,基于深度强化学习的规划器在安全性、效率和稳健性方面,与传统的基于模型的规划器相比都具有优越性。
近年来,移动机器人已成为各个行业的重要工具,尤其是在物流领域。深度强化学习作为一种替代性的计划方法而出现,它取代了过于保守的方法,并有望实现更高效,更灵活的导航。然而,深度强化学习方法由于易陷入局部最小和缺乏长期记忆,因此不适合用于远程导航,这阻碍了它在移动机器人工业应用中的广泛应用。本文提出了一种将基于深度强化学习的局部规划器与传统导航堆栈相结合的远程导航系统。因此,提出了用于训练和测试深度强化学习算法和经典方法的框架。针对各种传统规划器评估了该深度强化学习强化导航系统,结果表明该系统在安全性,效率和鲁棒性方面均优于现有方法。
内容中包含的图片若涉及版权问题,请及时与我们联系删除


评论
沙发等你来抢