
简介:想必大家或多或少都玩过游戏,强化学习现在在游戏领域应用很多。一个游戏中应该有一个操作对象, 这个对象就是一个智能体,这个智能体的每一步行动都会得到一个奖励(你比如说你往前一步捡到一个血包,那你的血量会增加,你放了一个技能,你的能量会减少,但被你砍到的敌人的血量会减少等等)。一个游戏有一个终止状态吧,你比如王者荣耀,一方水晶破了,就代表游戏结束了,再比如今年过年很火的合成大西瓜,屏幕满了就表示游戏结束了。那么一局游戏从开始到结束,一个智能体是不是会存在很多很多种状态,也会发出很多很多次动作,一直到游戏结束。这整个过程的状态走向以及动作序列正是强化学习需要研究的内容。这整个过程的状态走向以及动作序列正是强化学习需要研究的内容。
这一个完整的过程,我们叫做episod,即一个生命周期,那么整个生命周期的奖励值就是:
我们不能只考虑每一步的奖励值,而要考虑整个生命周期的生命值,也就是上面的R。
1.与环境交互的数据介绍
超级玛丽这个游戏应该是很多人小时候都玩过,那么如果这个游戏用强化学习来操作小人,那么交互图就是下图:
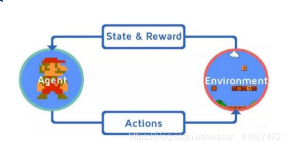
那么我们如何来记录一个智能体的一局游戏记录呢?答案如下:
其中S表示状态(state),a表示动作(action),S1通过a1到达S2,S2通过动作到达S3,如此迭代一直到ST。
那么问题来了,智能体怎么知道执行什么动作才能得到更多的奖励呢?
这就是强化学习要解决的核心问题了。
下面我们来看几个东西:
第一个问题:动作执行概率。
可以训练神经网络。
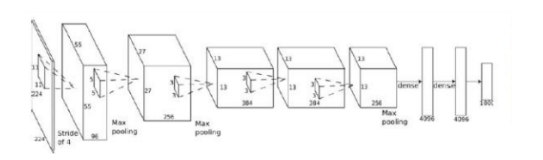
这个网络是在求什么呢
其实是在求
这个是什么玩意呢?它是代表状态St时候,执行动作at的概率。该值是通过调整网络的参数集合来训练得到的。
第二个问题:状态转换概率。
这个玩意是说状态St时候,执行动作at,到达状态St+1的概率是多少。那么在游戏里面,这个是不用我们管的,因为游戏规则都已经写好了。比如你放个技能,那你的下一个状态肯定是能量减少了。
第三个问题:奖励值。
那奖励怎么算呢,奖励是根据当前action和state共同决定的,这个在游戏里面也是游戏规则规定的,比如你被英雄A砍了一刀,你要掉多少血,你被英雄B砍一刀,你要掉多少血等等。
若不是在游戏里面,在其他领域,也可以根据action和state来设计奖励函数。
第四个问题:得到记录表达式。
那么了解了上面的这些玩意,我们就可以看这个公式了:

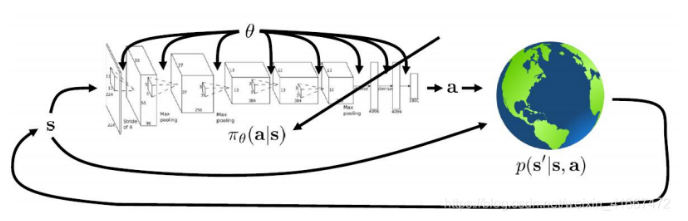
这个公式是模型的输出结果,它表示的就是一条记录表达式。里面有每个状态以及每个状态下执行的动作。
上面的过程如下图:
2.要完成的目标分析
那么到底要完成什么事情呢,上一小节其实已经说了,我们要求的是参数集。
因为我们要训练网络,所以我们要找到一个最优的参数集合。
那么什么样的参数集是最好的呢?
答案是得到奖励值最多的参数集合是最好的!
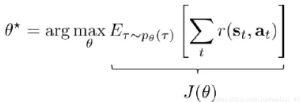
于是我们就有如下这个公式:

这个就代表总体奖励期望值最高的时候下的参数集。也就是目标函数
期望是什么,比如一个人平常考试分数就在70-90分,那么我们对他的期望就是80分左右。
为什么要用期望而不是准确值呢,因为智能体的这一系列过程有非常多的随机性,即使相同,得到的action也不相同。
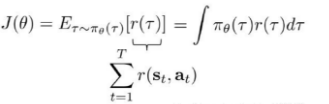
有了这个目标函数,下一步就是对目标函数进行求解。
首先我们看看奖励值期望如何求,我们先举个例子,假如让你估计一名同学下一次的考试成绩期望分数,你怎么估计,你肯定会想,让这个同学考100次试,我取个平均分就是他的成绩期望值。

这是什么办法呢?这就是大数定律。我们也可以用这个办法来求奖励值期望。
N代表我要把这个过程进行的次数,比如一万次,那i就从1到1w,针对每一次的过程,状态t=1到t=T,首先将每一次状态转换的奖励值累加,得到每一个过程的总奖励值,然后将1w次过程的奖励值相加,得到1w次过程的奖励值,最后再求平均值,就是我们要的期望值。
期望值我们求到了,但是我们要的不是期望值,而是参数集啊?那么如何来求参数集呢?
我们往下看:
表示当前序列的可能性,是奖励值,我们将改写一下:
再计算梯度:

继续变形:
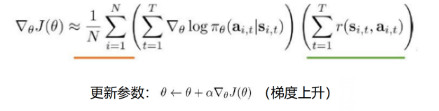
以上就是经过数学变换的目标函数。
3.baseline方法
如何来获取数据呢?
不断进行每个过程。然后做好每个过程的下图记录:
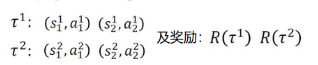
然后将数据带入目标公式:

但是以上过程有一个问题,有些任务几乎全都是奖励,而惩罚值很少,这就会造成一个问题,就是智能体无法通过负的惩罚值来知道自己什么不应该做,因为它得到的大多数是奖励值,而惩罚值很少。
这种情况我们就可以做一个去均值处理。也就是把奖励值减去一个baseline(下面用b表示):
其中b(也就是baseline)的值为:
这样是不是就解决了奖励值中,负数(惩罚值)很少但正数(奖励值)很多的问题呢。
4.Onpolicy与Offpolicy策略。
Onpolicy:就是训练数据是由当前agent和环境不断交互得到。
这就有一个问题。

在这个公式中是含的,也就是说你交互一次得到的数据,只能在当前下迭代一次,因为这条数据用完后会发生改变,一旦发生改变,那么这条数据就不能够再使用了。那就必须再交互一次得到一条数据,再进行下一次迭代。
所以效率相对不高。
Offpolicy:就是利用别的agent与环境交互得到的数据来用,这样就解决了上述的问题。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢