
【标题】myGym: Modular Toolkit for Visuomotor Robotic Tasks
【作者团队】Michal Vavrecka, Nikita Sokovnin, Megi Mejdrechova, Gabriela Sejnova, Marek Otahal
【论文链接】https://arxiv.org/pdf/2012.11643.pdf
【发表时间】2020.12.21
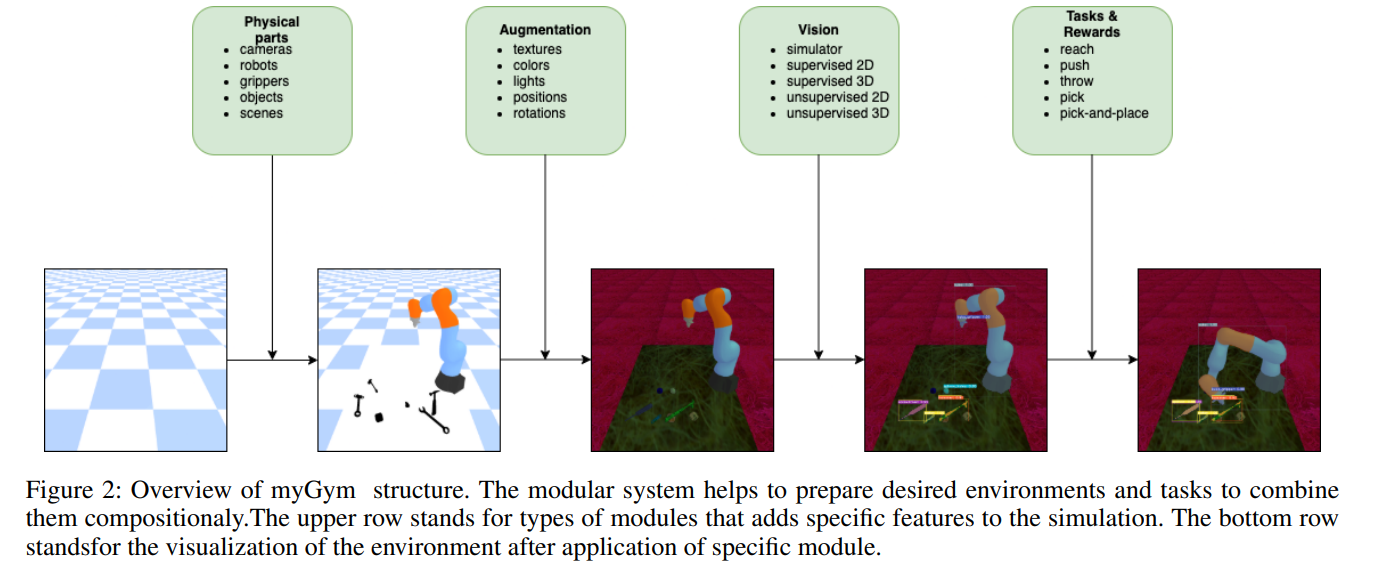
【推荐理由】本文提出了一个新的虚拟模拟器工具包myGym,它是为强化学习(RL)、内在激励和在3D模拟器中训练的模仿学习任务而开发的。经过训练的任务可以很容易地转移到真实世界的机器人场景中。模拟器的模块化结构使用户能够在各种机器人、环境和任务的大量场景中训练和验证他们的算法。与适用于经典机器人学习的现有工具包(如OpenAI Gym、Roboschool)相比,myGym还适用于需要内在动机的视觉运动(结合视觉和运动)无监督任务,即机器人能够产生自己的目标。还有用于人机交互的协作场景。该工具包为视觉运动任务提供预训练的视觉模块,允许快速原型制作,此外,用户可以定制视觉子模块,并使用他们自己的对象集重新训练。在实践中,用户选择期望的环境、机器人、对象、任务和奖励类型作为仿真参数,并且训练、可视化和测试本身被自动处理。因此,用户可以完全专注于神经网络架构的开发,同时使用预定义的参数来控制环境的行为。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢