
【标题】PFRL: Pose-Free Reinforcement Learning for 6D Pose Estimation
【作者团队】Jianzhun Shao, Yuhang Jiang, Gu Wang, Zhigang Li, Xiangyang Ji
【论文链接】https://arxiv.org/abs/2102.12096v1
【发表时间】2021.02.24
【推荐理由】在计算机视觉领域中,处理RGB图像时,常用的主流方法都是基于带有真实6D物体位姿信息的2D图像,但这种图像的获得代价却很大。本文提出了一种将6D位姿增强信息建模为MDP,并且将其作为强化学习方法的输入信息的方法。这意味着作者将传统的弱监督6D位姿信息替换为2D图像注释信息,大大减少了计算消耗以及时间代价。此方法利用序列性MDP信息来优化延迟积累回报。同时,作者提出了一种组合强化优化方法,以高效学习控制策略。实验表明,本文提出的无位姿RL方法在LINEMOD和T-LESS数据集上可达到state-of-art的性能。
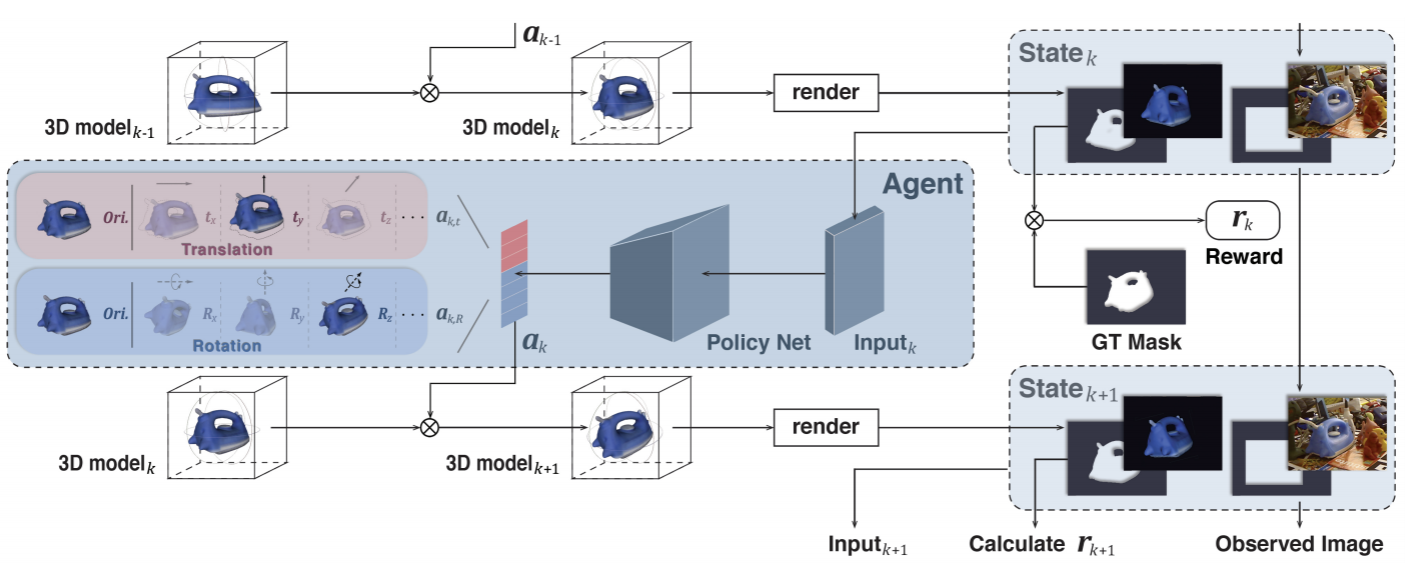
图1 PFRL框架
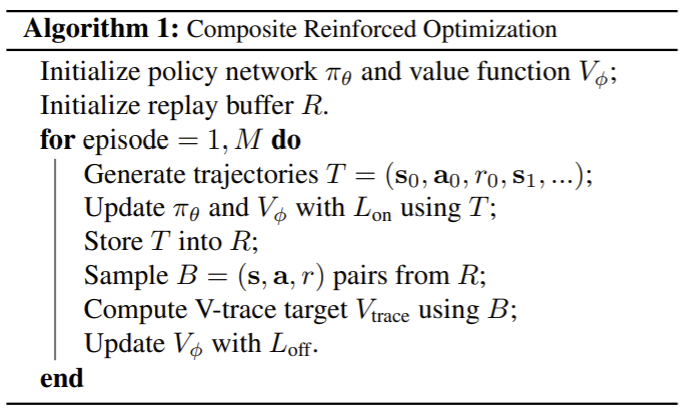
图2 组合强化优化算法
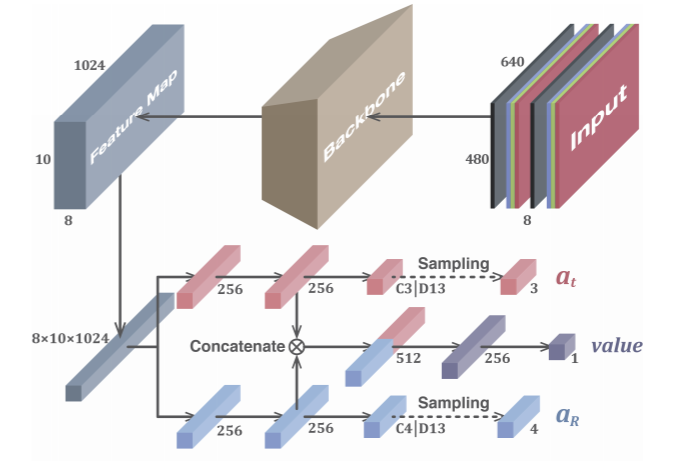
图3 分散策略结构
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢