
【标题】Learning to Fly—a Gym Environment with PyBullet Physics for Reinforcement Learning of Multi-agent Quadcopter Control
【作者团队】Jacopo Panerati,Hehui Zheng,SiQi Zhou,James Xu,Amanda Prorok and Angela P. Schoellig
【论文链接】https://arxiv.org/abs/2103.02142v2
【发表时间】2021.03.04
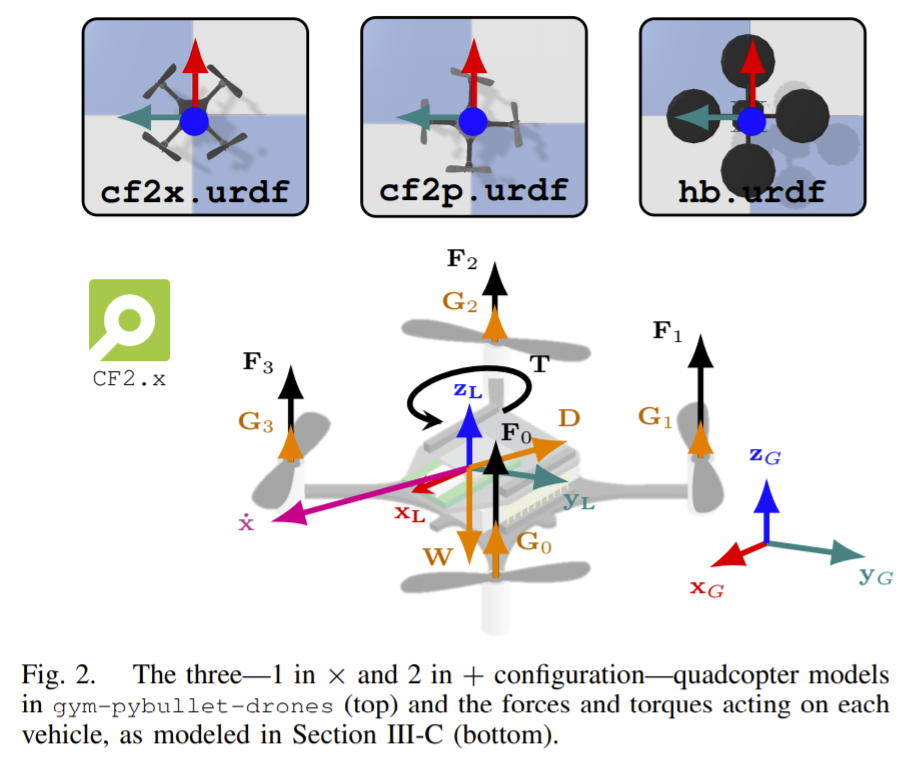
【推荐理由】本文提出了一种基于Bullet物理引擎的与OpenAI Gym类似的环境,专为四轴飞行器设计。它拥有多智能体和基于视觉的强化学习交互界面,同时支持真实碰撞与空中动态效果。此环境不但支持传统控制任务,还支持强化学习的单智能体和多智能体任务等,可进行控制理论与机器学习相结合的科研工作。

内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢