
论文标题:Real-time Monocular Depth Estimation with Sparse Supervision on Mobile
论文链接:https://arxiv.org/abs/2105.12053
作者单位:三星研究院(英国)
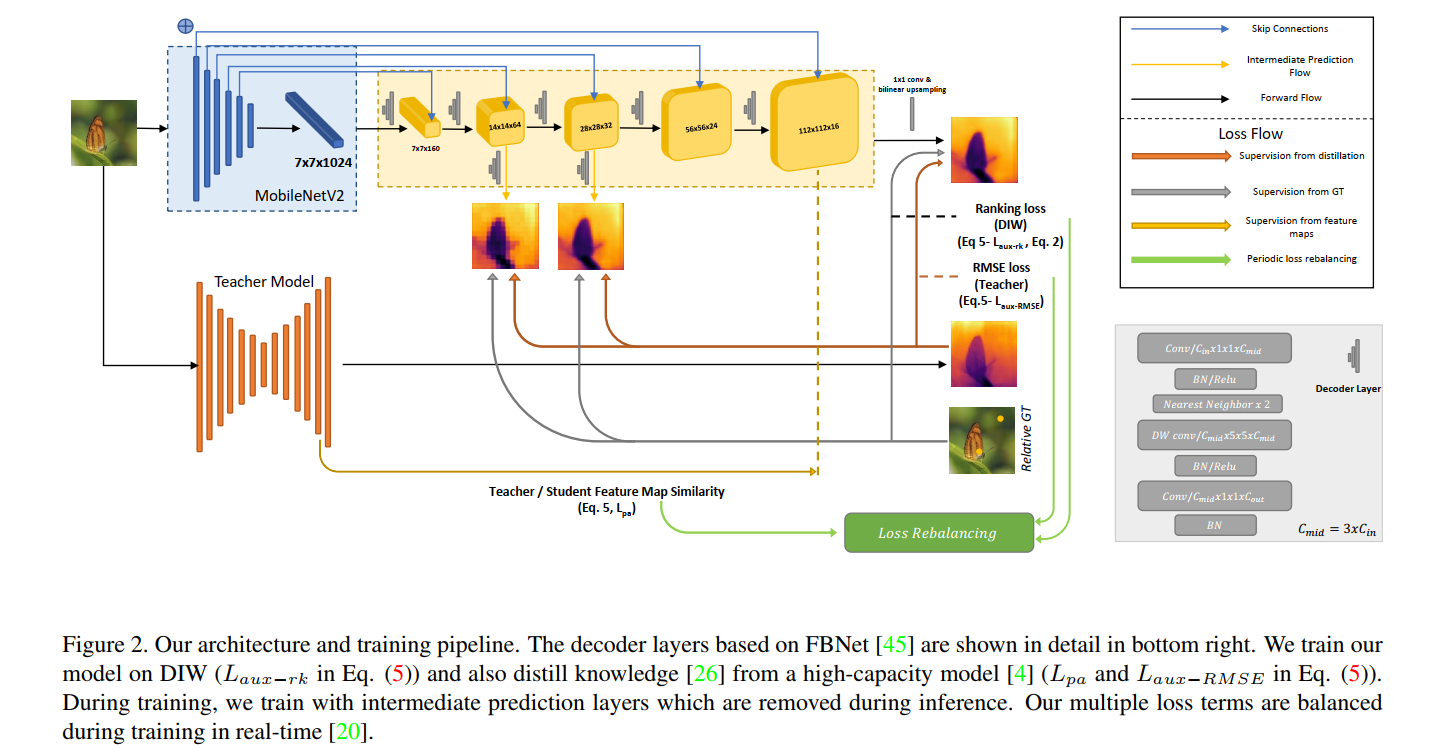
本文对单目深度估计网络的主干模型选择,知识蒸馏,中间预测,模型剪枝和损失重新平衡等进行深入分析,进而设计了一种在移动设备上实时运行的单目深度估计网络,在移动GPU上速度高达44 FPS!
对于诸如自动驾驶,增强现实和图像编辑等各种应用,单目(相对或度量)深度估计是一项关键任务。近年来,随着移动设备的可用性不断提高,准确且对移动设备友好的深度模型变得越来越重要。越来越精确的模型通常需要更多的计算资源,这阻碍了此类模型在移动设备上的使用。移动用例可以说是最不受限制的用例,它需要高度准确但对移动友好的体系结构。因此,我们尝试回答以下问题:如何在不增加进一步复杂性(即参数)的情况下改进模型?为此,我们从各个维度系统地探索了相对深度估算模型的设计空间,并且我们展示了通过关键的设计选择和消融研究,即使是现有的体系结构也可以达到与现有技术相比极高的竞争性能。我们的研究涵盖了深入的主干模型选择过程,知识蒸馏,中间预测,模型剪枝和损失重新平衡。我们展示了仅使用DIW作为监控数据集的模型,该模型在具有2.6M参数的DIW上实现了0.1156 WHDR,在移动GPU上达到了37 FPS,而没有进行剪枝或特定于硬件的优化。我们模型的修剪版本在具有1M参数的DIW上达到0.1208 WHDR,在移动GPU上达到44 FPS。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢