
【标题】Attention-based Reinforcement Learning for Real-Time UAV Semantic Communication
【作者团队】Won Joon Yun, Byungju Lim, Soyi Jung, Young-Chai Ko, Jihong Park, Joongheon Kim, Mehdi Bennis
【论文链接】https://arxiv.org/pdf/2105.10716.pdf
【发表日期】2021.5.22
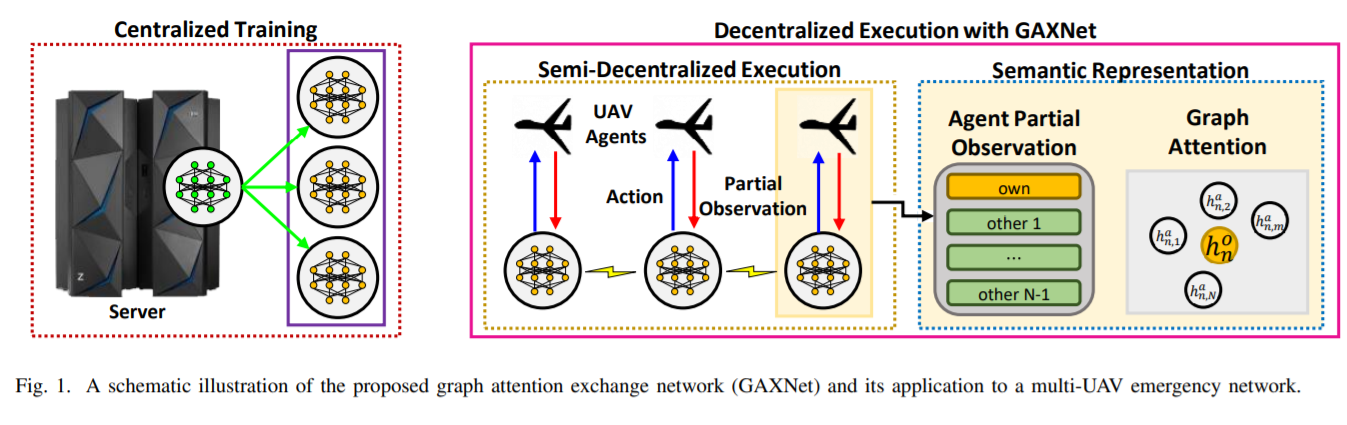
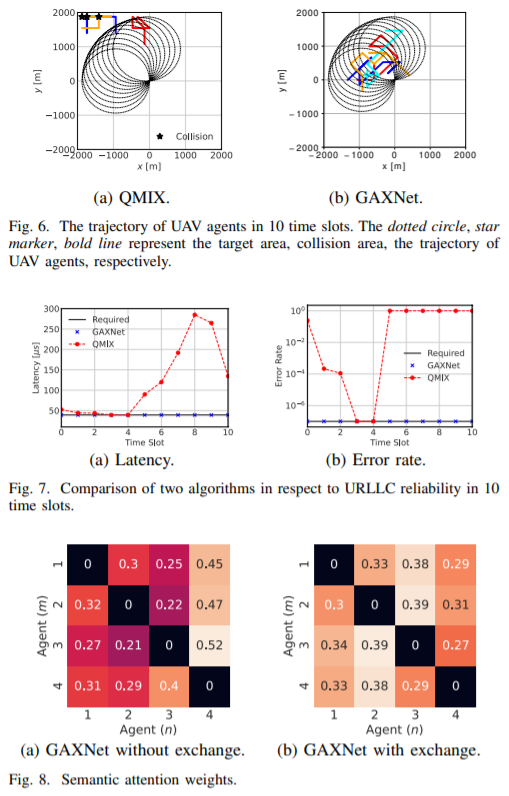
【推荐理由】本文为无人机的URLLC问题,提出了一个新颖的CTDE MADRL框架。该框架创造了图注意力交换网络(GAXNet),通过与最先进的CTDE方法QMIX相比,该方法具有更低的延迟和更高的可靠性。
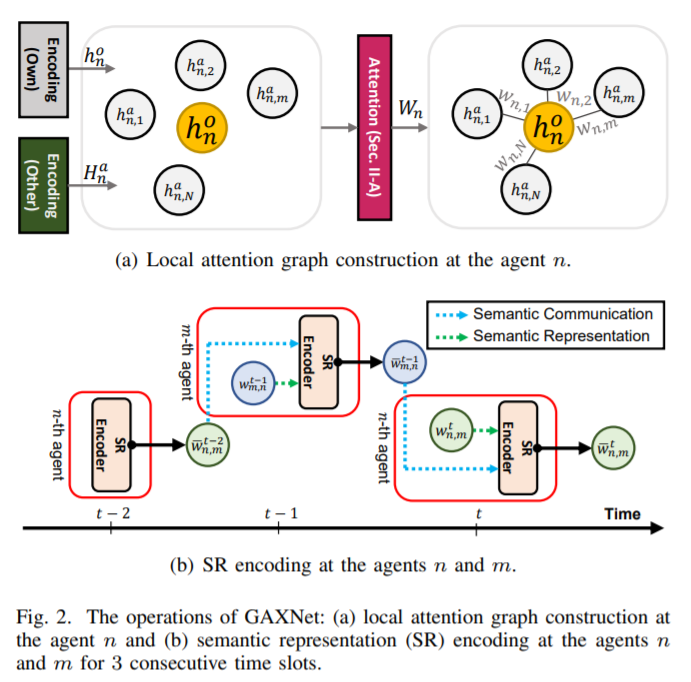
本文研究了移动地面用户的空对地超可靠和低延迟通信(URLLC)问题。其通过实时控制多个无人飞行器(UAV)来完成,同时避免了无人驾驶飞机之间的碰撞。为此,本文提出了一种新颖的多主体深度强化学习(MADRL)框架,该框架创造了图注意力交换网络(GAXNet)。在GAXNet中,每个UAV都会在本地构造一个注意力图,以测量对其相邻UAV的注意力水平,同时与其他UAV交换注意力权重,以减少它们之间的注意力失配。仿真结果证实了GAXNet在训练过程中可获得高达4.5倍的更高回报。在执行时,GAXNet不会造成UAV之间的冲突,将延迟降低了6.5倍,目标错误率为0.0000001。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢