
【标题】Interpretable UAV Collision Avoidance using Deep Reinforcement Learning
【作者团队】Deepak-George Thomas, Daniil Olshanskyi, Karter Krueger, Ali Jannesari
【论文链接】https://arxiv.org/pdf/2105.12254.pdf
【发表日期】2021.5.25
【推荐理由】本文研究了在无人机避碰中将SAM与DRL方法集成,并与传统的CNN模型进行了比较。结果表明,DRL-SAM在训练过程中的表现优于DRL-CNN,而且证明了DRL-SAM算法的可解释性和鲁棒性。
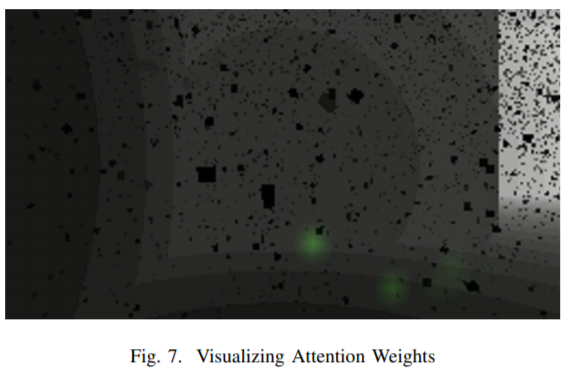
任何成功的自动飞行系统的主要组成部分都是任务完成和避免碰撞。大多数深度学习算法在训练有素的环境和条件下执行这些方面时都是成功的。但是,它们在新颖的环境下会失败。本文提出了使用深度强化学习和自主注意模型增强的自主无人机飞行,当受到不同的输入时,该模型可以有效地进行推理。除了其推理能力外,它们还具有可解释性,使其能够在实际条件下使用。在不同的天气和环境下测试了我们的算法,并发现它与传统的“深度强化学习”算法相比具有更强的鲁棒性。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢