
【标题】Sim-to-Real Transfer in Deep Reinforcement Learning for Robotics: a Survey
【作者】Wenshuai Zhao, Jorge Peña Queralta, Tomi Westerlund
【论文链接】https://arxiv.org/pdf/2009.13303.pdf
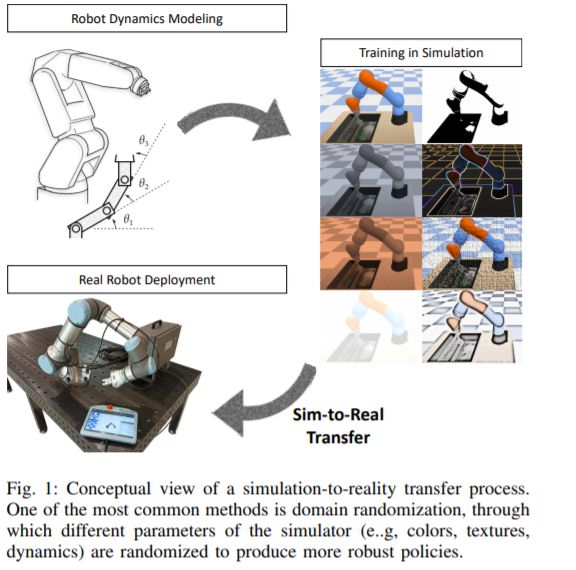
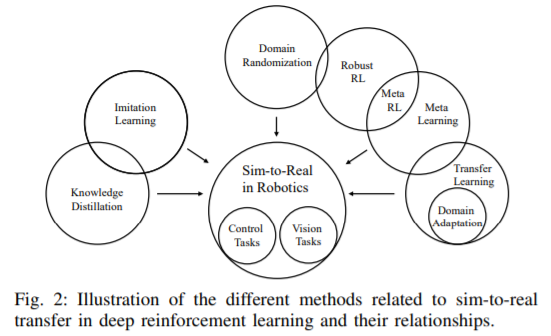
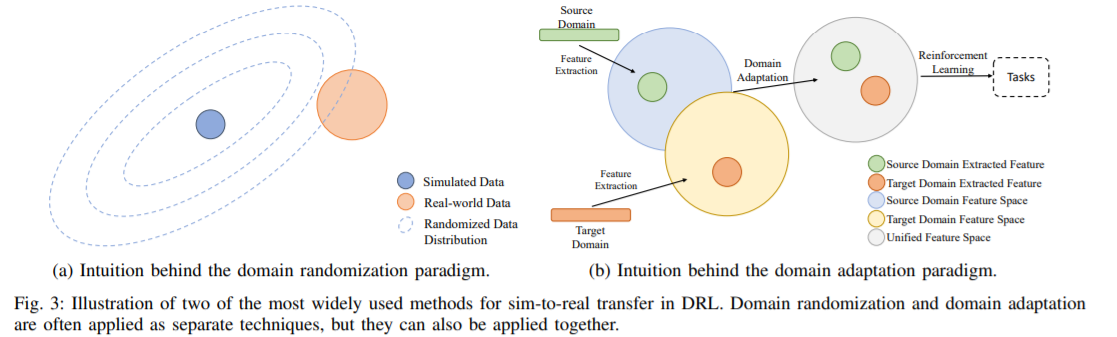
【推荐理由】深度强化学习最近在机器人领域中的多个领域取得了巨大成功。由于收集真实世界数据的局限性,即样本效率低和收集成本高,因此利用模拟环境训练不同的代理。这不仅有助于提供潜在的无限数据源,而且还减轻了对真实机器人的安全问题。然而,当模型被迁移到真实的机器人时,模拟环境和真实环境的差距就会降低策略的性能。因此,目前诸多研究工作正致力于缩小此差距,实现更有效的策略迁移。近年来,出现了适用于不同领域的多种方法,但缺乏一个全面的综述总结不同的方法。这篇综述性论文介绍了深度强化学习中从模拟到真实迁移的基本背景,并综述了目前使用的主要方法:领域随机化、领域适应性、模仿学习、元学习和知识提炼等。并对一些最相关的最新工作进行了分类,概述了主要的应用场景。最后,本文讨论了不同方法的主要机遇和挑战,并指出了最有前景的方向。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢