【标题】Optical Tactile Sim-to-Real Policy Transfer via Real-to-Sim Tactile Image Translation
【作者】Alex Church, John Lloyd, Raia Hadsell, Nathan F. Lepora
【发表时间】2021.6.16
【论文链接】https://arxiv.org/pdf/2106.08796.pdf
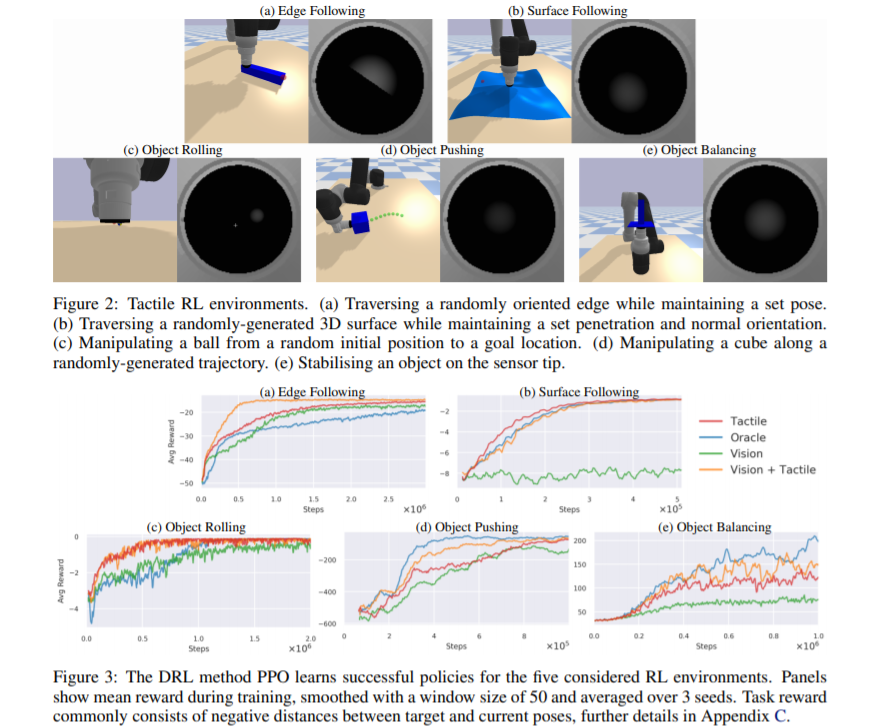
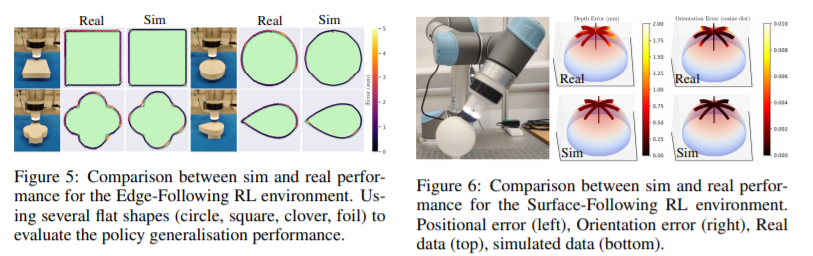
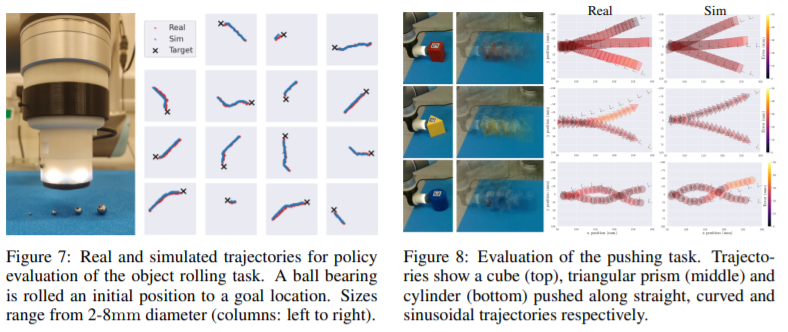
【推荐理由】最新研究表明,模拟已成为深度强化学习从视觉和本体感受输入中安全有效地获取一般和复杂控制策略的关键。尽管触觉信息与环境交互直接相关,但通常不会考虑触觉信息。本文提出了一种针对触觉机器人和强化学习量身定制的模拟环境。提供了一种简单快速的光学触觉传感器模拟方法,将高分辨率的接触几何图形表示为深度图像。并将近端策略优化 (PPO) 用于学习跨所有考虑任务的成功策略。数据驱动的方法能够将真实触觉传感器的当前状态转换为相应的模拟深度图像。该策略在物理机器人的实时控制回路中实现,以演示在多个需要触觉的物理交互任务上的实现零样本sim-to-real策略迁移。
内容中包含的图片若涉及版权问题,请及时与我们联系删除


评论
沙发等你来抢