
【标题】Pybullet-implementation of the multi-goal robotics environment originally from Open AI Gym
【推荐理由】这项工作将最初基于商业Mujoco引擎的OpenAI Gym多目标机器人操纵环境重新实施到开源的Pybullet引擎上。通过比较 "后知后觉 "经验回放辅助的深度确定性策略梯度代理在两种环境中的表现,我们证明了我们对原始环境的成功重新实现。此外,我们为用户提供了新的API,以访问联合控制模式、图像观察和具有可定制的相机和内置的手持相机的目标。我们进一步设计了一套多步骤、多目标、长跨度和稀疏奖励的机器人操纵任务,旨在激发新的目标条件强化学习算法来应对这种挑战。我们使用一个简单的、基于人类优先权的课程学习方法来衡量多步骤的操纵任务。我们还讨论了关于此类任务的未来研究机会。
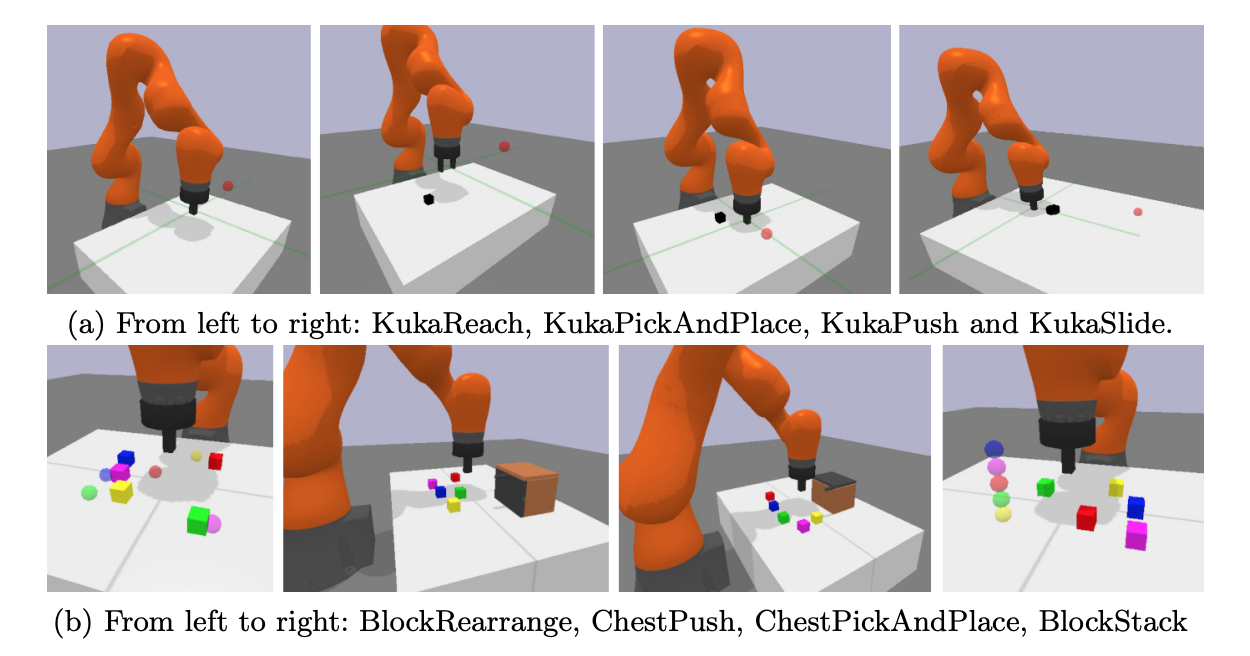
最新版本使用kuka iiwa14 7DoF手臂,配备robotiq85双指抓手或一个简单的平行爪。它基本的四个任务与OpenAI Gym中的任务基本相同: 伸手,推,取放,滑动。然而,当机器人用robotiq85抓手拿起一个木块时,可能看起来很滑稽,因为它的动作不足,因此很难对模拟进行微调。你可以使用平行爪子,它实际上与OpenAI的爪子相同。这个软件包也提供了一些较难的任务,用于长角稀疏奖励的机械臂操纵任务,在这个软件包上也是如此。所有的环境都已经在一篇论文中进行了总结。
【Github】https://github.com/IanYangChina/pybullet_multigoal_gym
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢