
【标题】RRL: Resnet as representation for Reinforcement Learning
【作者团队】Rutav Shah, Vikash Kumar
【发表日期】2021.7.9
【论文链接】https://arxiv.org/pdf/2107.03380.pdf
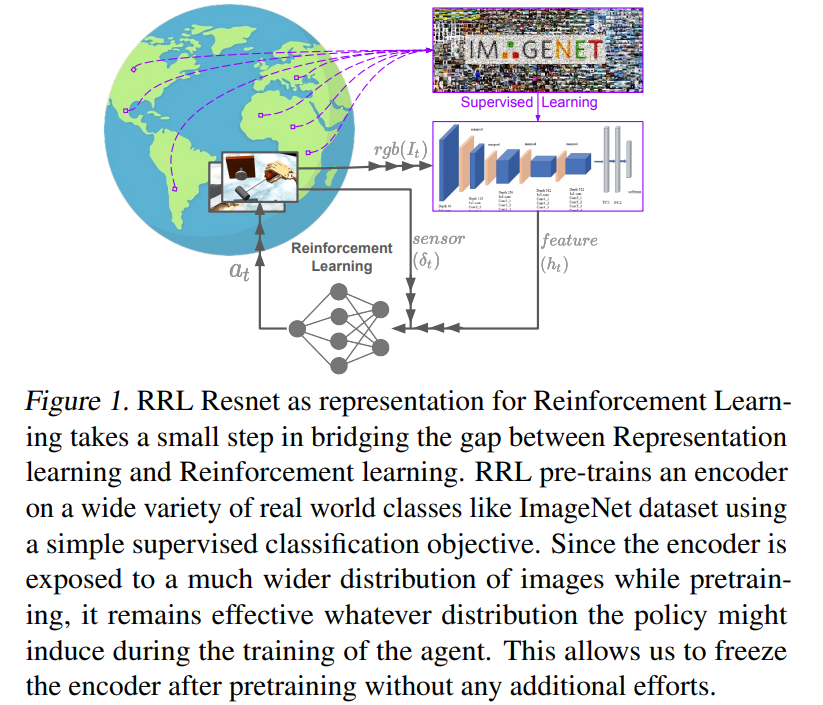
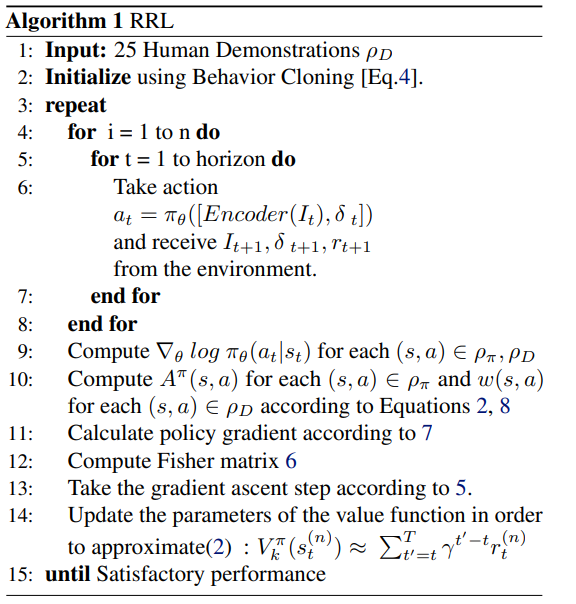
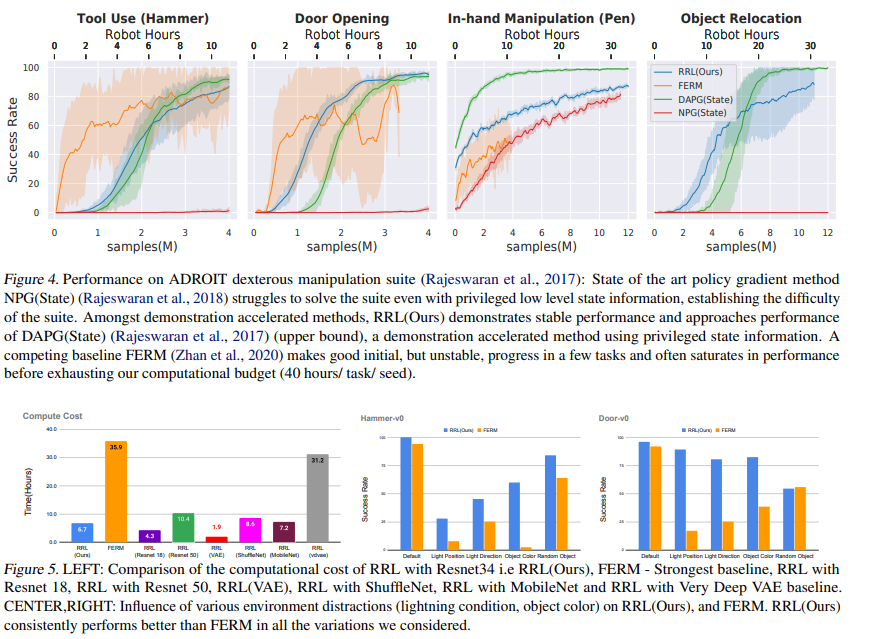
【推荐理由】通过在非仪器化环境中的直接交互自主学习行为的能力可以导致通用机器人能够提高生产力或在非结构化环境(如家庭)中提供护理。这种未经仪表化的设置保证仅使用机器人的本体感受传感器(例如车载摄像头、关节编码器等)进行操作,由于高维和部分可观察性问题,这对策略学习可能具有挑战性。故本文提出 RRL:Resnet 作为强化学习的表示——一种直接而有效的方法,可以直接从本体感受输入中学习复杂的行为。RRL 将从预训练的 Resnet 中提取的特征融合到标准强化学习管道中,并提供与直接从状态学习相当的结果。在模拟灵巧操作基准测试中,最先进的方法未能取得重大进展,RRL 提供了丰富的接触行为。RRL 的吸引力在于它简单地汇集了来自表示学习、模仿学习和强化学习领域的最新研究。其直接从视觉输入中学习行为的有效性,与直接从状态中学习的性能和样本效率相匹配,即使在复杂的高维域中,也远非显而易见。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢